Minimization of nonlinear energy functional
In this example we solve the following nonlinear minimization problem
Find such that
Here the energy functional has the form
where
Necessary optimality condition (Euler-Lagrange condition)
Let denote the first variation of in the direction , i.e.
The necessary condition is that the first variation of equals to 0 for all directions :
Weak form:
To obtain the weak form of the above necessary condition, we first expand the term as
After some simplification, we obtain
By neglecting the terms, we write the weak form of the necessary conditions as
Find such that
Strong form:
To obtain the strong form, we invoke Green’s first identity and write
Since is arbitrary in and on , the strong form of the non-linear boundary problem reads
Infinite-dimensional Newton’s Method
Consider the expansion of the first variation about in a direction
where
The infinite-dimensional Newton’s method reads
Given the current solution , find such that
Update the solution using the Newton direction
Hessian
To derive the weak form of the Hessian, we first expand the term as
Then, after some simplification, we obtain
Weak form of Newton step:
Given , find such that
The solution is then updated using the Newton direction
Here denotes a relaxation parameter (back-tracking/line-search) used to achieve global convergence of the Newton method.
Strong form of the Newton step
1. Load modules
To start we load the following modules:
-
dolfin: the python/C++ interface to FEniCS
-
math: the python module for mathematical functions
-
numpy: a python package for linear algebra
-
matplotlib: a python package used for plotting the results
from __future__ import print_function, division, absolute_import
import dolfin as dl
import matplotlib.pyplot as plt
%matplotlib inline
from hippylib import nb
import math
import numpy as np
import logging
logging.getLogger('FFC').setLevel(logging.WARNING)
logging.getLogger('UFL').setLevel(logging.WARNING)
dl.set_log_active(False)
2. Define the mesh and finite element spaces
We construct a triangulation (mesh) of the computational domain with nx elements in the x-axis direction and ny elements in the y-axis direction.
On the mesh , we then define the finite element space consisting of globally continuous piecewise linear functions and we create a function .
By denoting by the finite element basis for the space we have where represents the coefficients in the finite element expansion of .
Finally we define two special types of functions: the TestFunction and the TrialFunction . These special types of functions are used by FEniCS to generate the finite element vectors and matrices which stem from the first and second variations of the energy functional .
nx = 32
ny = 32
mesh = dl.UnitSquareMesh(nx,ny)
Vh = dl.FunctionSpace(mesh, "CG", 1)
uh = dl.Function(Vh)
u_hat = dl.TestFunction(Vh)
u_tilde = dl.TrialFunction(Vh)
nb.plot(mesh, show_axis="on")
print( "dim(Vh) = ", Vh.dim() )
dim(Vh) = 1089
3. Define the energy functional
We now define the energy functional
The parameters , and the forcing term are defined in FEniCS using the keyword Constant. To define coefficients that are space dependent one should use the keyword Expression.
The Dirichlet boundary condition
is imposed using the DirichletBC class.
To construct this object we need to provide
-
the finite element space
Vh -
the value
u_0of the solution at the Dirichlet boundary.u_0can either be aConstantor anExpressionobject. -
the object
Boundarythat defines on which part of we want to impose such condition.
f = dl.Constant(1.)
k1 = dl.Constant(0.05)
k2 = dl.Constant(1.)
Pi = dl.Constant(.5)*(k1 + k2*uh*uh)*dl.inner(dl.grad(uh), dl.grad(uh))*dl.dx - f*uh*dl.dx
class Boundary(dl.SubDomain):
def inside(self, x, on_boundary):
return on_boundary
u_0 = dl.Constant(0.)
bc = dl.DirichletBC(Vh,u_0, Boundary() )
4. First variation
The weak form of the first variation reads
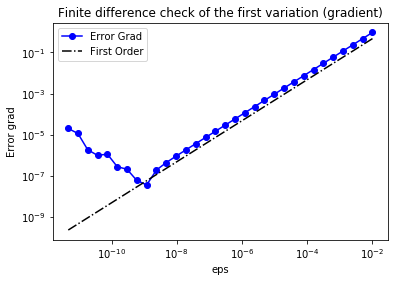
We use a finite difference check to verify that our derivation is correct. More specifically, we consider a function and we verify that for a random direction we have
In the figure below we show in a loglog scale the value of as a function of . We observe that decays linearly for a wide range of values of , however we notice an increase in the error for extremely small values of due to numerical stability and finite precision arithmetic.
NOTE: To compute the first variation we can also use the automatic differentiation of variational forms capabilities of FEniCS and write
grad = dl.derivative(Pi, u, u_hat)
grad = (k2*uh*u_hat)*dl.inner(dl.grad(uh), dl.grad(uh))*dl.dx + \
(k1 + k2*uh*uh)*dl.inner(dl.grad(uh), dl.grad(u_hat))*dl.dx - f*u_hat*dl.dx
u0 = dl.interpolate(dl.Expression("x[0]*(x[0]-1)*x[1]*(x[1]-1)", degree=2), Vh)
n_eps = 32
eps = 1e-2*np.power(2., -np.arange(n_eps))
err_grad = np.zeros(n_eps)
uh.assign(u0)
pi0 = dl.assemble(Pi)
grad0 = dl.assemble(grad)
uhat = dl.Function(Vh).vector()
uhat.set_local(np.random.randn(Vh.dim()))
uhat.apply("")
bc.apply(uhat)
dir_grad0 = grad0.inner(uhat)
for i in range(n_eps):
uh.assign(u0)
uh.vector().axpy(eps[i], uhat) #uh = uh + eps[i]*dir
piplus = dl.assemble(Pi)
err_grad[i] = abs( (piplus - pi0)/eps[i] - dir_grad0 )
plt.figure()
plt.loglog(eps, err_grad, "-ob", label="Error Grad")
plt.loglog(eps, (.5*err_grad[0]/eps[0])*eps, "-.k", label="First Order")
plt.title("Finite difference check of the first variation (gradient)")
plt.xlabel("eps")
plt.ylabel("Error grad")
plt.legend(loc = "upper left")
plt.show()
5. Second variation
The weak form of the second variation reads
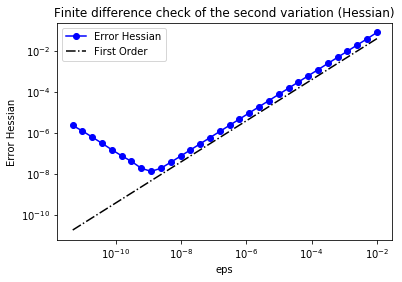
As before, we verify that for a random direction we have
In the figure below we show in a loglog scale the value of as a function of . As before, we observe that decays linearly for a wide range of values of , however we notice an increase in the error for extremely small values of due to numerical stability and finite precision arithmetic.
NOTE: To compute the second variation we can also use automatic differentiation and write
H = dl.derivative(grad, u, u_tilde)
H = k2*u_tilde*u_hat*dl.inner(dl.grad(uh), dl.grad(uh))*dl.dx + \
dl.Constant(2.)*(k2*uh*u_hat)*dl.inner(dl.grad(u_tilde), dl.grad(uh))*dl.dx + \
dl.Constant(2.)*k2*u_tilde*uh*dl.inner(dl.grad(uh), dl.grad(u_hat))*dl.dx + \
(k1 + k2*uh*uh)*dl.inner(dl.grad(u_tilde), dl.grad(u_hat))*dl.dx
uh.assign(u0)
H_0 = dl.assemble(H)
H_0uhat = H_0 * uhat
err_H = np.zeros(n_eps)
for i in range(n_eps):
uh.assign(u0)
uh.vector().axpy(eps[i], uhat)
grad_plus = dl.assemble(grad)
diff_grad = (grad_plus - grad0)
diff_grad *= 1/eps[i]
err_H[i] = (diff_grad - H_0uhat).norm("l2")
plt.figure()
plt.loglog(eps, err_H, "-ob", label="Error Hessian")
plt.loglog(eps, (.5*err_H[0]/eps[0])*eps, "-.k", label="First Order")
plt.title("Finite difference check of the second variation (Hessian)")
plt.xlabel("eps")
plt.ylabel("Error Hessian")
plt.legend(loc = "upper left")
plt.show()
6. The infinite dimensional Newton Method
The infinite dimensional Newton step reads
Given , find such that
Update the solution using the Newton direction
Here, for simplicity, we choose equal to 1. In general, to guarantee global convergence of the Newton method the parameter should be appropriately chosen (e.g. back-tracking or line search).
The linear systems to compute the Newton directions are solved using the conjugate gradient (CG) with algebraic multigrid preconditioner with a fixed tolerance. In practice, one should solve the Newton system inexactly by early termination of CG iterations via Eisenstat–Walker (to prevent oversolving) and Steihaug (to avoid negative curvature) criteria.
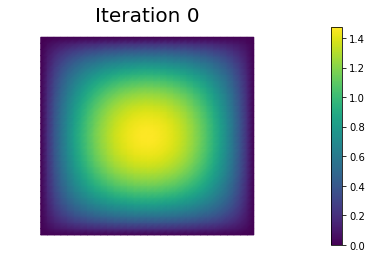
In the output below, for each iteration we report the number of CG iterations, the value of the energy functional, the norm of the gradient, and the inner product between the gradient and the Newton direction .
In the example, the stopping criterion is relative norm of the gradient . However robust implementation of the stopping criterion should monitor also the quantity .
uh.assign(dl.interpolate(dl.Constant(0.), Vh))
rtol = 1e-9
max_iter = 10
pi0 = dl.assemble(Pi)
g0 = dl.assemble(grad)
bc.apply(g0)
tol = g0.norm("l2")*rtol
du = dl.Function(Vh).vector()
lin_it = 0
print ("{0:3} {1:3} {2:15} {3:15} {4:15}".format(
"It", "cg_it", "Energy", "(g,du)", "||g||l2") )
for i in range(max_iter):
[Hn, gn] = dl.assemble_system(H, grad, bc)
if gn.norm("l2") < tol:
print ("\nConverged in ", i, "Newton iterations and ", lin_it, "linear iterations.")
break
myit = dl.solve(Hn, du, gn, "cg", "petsc_amg")
lin_it = lin_it + myit
uh.vector().axpy(-1., du)
pi = dl.assemble(Pi)
print ("{0:3d} {1:3d} {2:15e} {3:15e} {4:15e}".format(
i, myit, pi, -gn.inner(du), gn.norm("l2")) )
plt.figure()
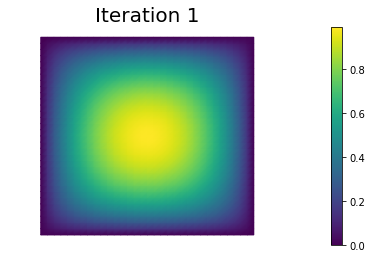
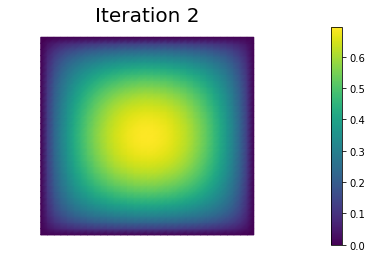
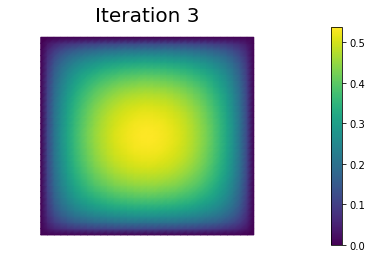
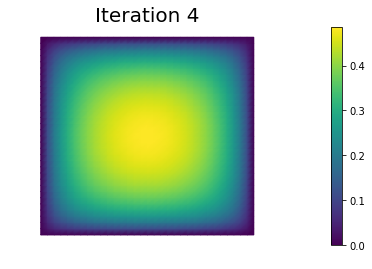
nb.plot(uh, mytitle="Iteration {0:1d}".format(i))
plt.show()
It cg_it Energy (g,du) ||g||l2
0 4 2.131680e+00 -7.006604e-01 3.027344e-02
1 3 1.970935e-01 -3.236483e+00 4.776453e-01
2 3 -1.353236e-01 -5.650329e-01 1.383328e-01
3 3 -1.773194e-01 -7.431340e-02 3.724056e-02
4 4 -1.796716e-01 -4.455251e-03 7.765301e-03
5 4 -1.796910e-01 -3.850049e-05 7.391677e-04
6 4 -1.796910e-01 -4.633942e-09 9.309628e-06
7 4 -1.796910e-01 -8.692570e-17 1.501038e-09
Converged in 8 Newton iterations and 29 linear iterations.
uh.assign(dl.interpolate(dl.Constant(0.), Vh))
parameters={"symmetric": True, "newton_solver": {"relative_tolerance": 1e-9, "report": True, \
"linear_solver": "cg", "preconditioner": "petsc_amg"}}
dl.solve(grad == 0, uh, bc, J=H, solver_parameters=parameters)
final_g = dl.assemble(grad)
bc.apply(final_g)
print ( "Norm of the gradient at converge", final_g.norm("l2") )
print ("Value of the energy functional at convergence", dl.assemble(Pi) )
nb.plot(uh)
plt.show()
Norm of the gradient at converge 8.041168028721095e-15
Value of the energy functional at convergence -0.17969096618442762
Hands on
Consider the following nonlinear minimization problem
Find such that
where
Question 1
Derive the first-order necessary condition for optimality using calculus of variations, in both weak and strong form.
Let denote the first variation of in the direction , i.e.
The necessary condition is that the first variation of equals to 0 for all directions :
To obtain the weak form of the above necessary condition, we first expand the term as
Then, we have
After setting , we write the weak form of the necessary conditions as
Find such that
To obtain the strong form, we invoke Green’s first identity and write
Since is arbitrary in and on , the strong form of the non-linear boundary problem reads
Note: The boundary condition is a Robin type boundary condition.
Question 2
Derive the infinite-dimensional Newton step, in both weak and strong form.
To derive the infinite-dimensional Newton step, we first compute the second variation of , that is
After some simplification, we obtain
The weak form of Newton step then reads
Given , find such that
Update the solution using the direction
Here denotes a relaxation parameter (back-tracking/line-search) used to achieve global convergence of the Newton method.
Finally the strong form of the Newton step reads
Question 3
Discretize and solve the above nonlinear minimization problem using FEniCS.
nx = 32
ny = 32
mesh = dl.UnitSquareMesh(nx,ny)
Vh = dl.FunctionSpace(mesh, "CG", 1)
uh = dl.Function(Vh)
u_hat = dl.TestFunction(Vh)
u_tilde = dl.TrialFunction(Vh)
print( "dim(Vh) = ", Vh.dim() )
Pi = dl.Constant(.5)*dl.inner(dl.grad(uh), dl.grad(uh))*dl.dx + dl.exp(-uh)*dl.dx + dl.Constant(.5)*uh*uh*dl.ds
grad = dl.inner(dl.grad(u_hat), dl.grad(uh))*dl.dx - u_hat*dl.exp(-uh)*dl.dx + uh*u_hat*dl.ds
H = dl.inner(dl.grad(u_hat), dl.grad(u_tilde))*dl.dx + u_hat*u_tilde*dl.exp(-uh)*dl.dx + u_tilde*u_hat*dl.ds
uh.assign(dl.interpolate(dl.Constant(0.), Vh))
rtol = 1e-9
max_iter = 10
pi0 = dl.assemble(Pi)
g0 = dl.assemble(grad)
tol = g0.norm("l2")*rtol
du = dl.Function(Vh).vector()
lin_it = 0
print ("{0:3} {1:3} {2:15} {3:15} {4:15}".format(
"It", "cg_it", "Energy", "(g,du)", "||g||l2") )
for i in range(max_iter):
[Hn, gn] = dl.assemble_system(H, grad)
if gn.norm("l2") < tol:
print ("\nConverged in ", i, "Newton iterations and ", lin_it, "linear iterations.")
break
myit = dl.solve(Hn, du, gn, "cg", "petsc_amg")
lin_it = lin_it + myit
uh.vector().axpy(-1., du)
pi = dl.assemble(Pi)
print ("{0:3d} {1:3d} {2:15e} {3:15e} {4:15e}".format(
i, myit, pi, -gn.inner(du), gn.norm("l2")) )
plt.figure()
nb.plot(uh, mytitle="Solution", )
plt.show()
dim(Vh) = 1089
It cg_it Energy (g,du) ||g||l2
0 4 8.858149e-01 -2.247173e-01 3.076215e-02
1 4 8.857473e-01 -1.352648e-04 7.406045e-04
2 5 8.857473e-01 -3.976430e-11 5.593599e-07
3 6 8.857473e-01 -1.214857e-21 4.624314e-11
Converged in 4 Newton iterations and 19 linear iterations.
Copyright © 2016-2018, The University of Texas at Austin & University of California, Merced.
All Rights reserved.
See file COPYRIGHT for details.
This file is part of the hIPPYlib library. For more information and source code availability see https://hippylib.github.io.
hIPPYlib is free software; you can redistribute it and/or modify it under the terms of the GNU General Public License (as published by the Free Software Foundation) version 2.0 dated June 1991.