Introduction to Sampling Methods
Goals
There are two goals for this lab:
- To further acquaint you with MUQ, including random number generators and model construction.
- To develop a deeper understanding of methods for sampling from general distributions
- Nonlinear transformations
- Rejection Sampling
- Markov chain Monte Carlo (MCMC)
- Importance Sampling
Problem Description
To illustrate these topics, we will consider the infamous “Banana” distribution, which is also called the “Boomerang” distribution in some circles.
Consider a standard normal random variable $z\sim N(0,I)$. For some $a,b>0$, consider the transformation $m=S(z)$ given by
With this transformation, sampling $m$ can be accomplished by drawing a random sample of $z$ and then evaluating $S(z)$.
We will also sample $m$ using other methods that require evaluating the density $p(m)$. To evaluate the density, we need to inverse transformation $T(m)=z$, which takes the form
Let $p_z(z)$ denote the Gaussian density on $z$. Then the density on $M$ is given by
where denotes the determinant of the Jacobian matrix of . The is the banana density and (for $a=1$) it looks like:
<img src=”BananaDensity.png” height=200px alt=”Banana Density”>
The form of $p_m(m)$ can also be simplified by considering the determinant term in more detail. The Jacobian is given by
The determinant of a lower triangular matrix is the product of the digaonal entries, so $\left\vert\det{\nabla T}\right\vert = \frac{1}{a} a$. Interestingly, the determinant of this Jacobian is always $1$, regardless of $a$ and $m$! Thus, for this problem $p_m(m) = p_z(T(m))$. It is important to note that this is a very special case and in general, the determinant term is required to define $p_m(m)$.
import sys
sys.path.insert(0,'/home/fenics/Installations/MUQ_INSTALL/lib')
import matplotlib.pyplot as plt
import matplotlib.cm as cm
import numpy as np
from IPython.display import Image
import pymuqUtilities as mu
from pymuqUtilities import RandomGenerator as rg
import pymuqModeling as mm
Background: Simple Random number generation
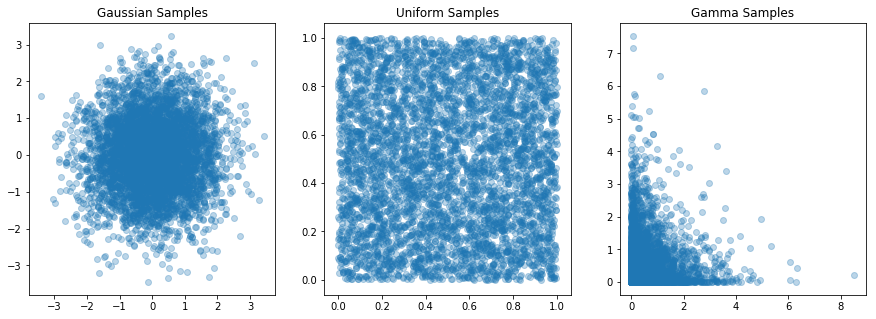
Below are a few examples of generating random variables in MUQ for a few canonical distributions. The functions described here will serve as building blocks for more sophisticated sampling techniques.
Continuous Random Variables
numSamps = 5000
paramDim = 2
rg.SetSeed(2012)
# Gaussian Samples
gaussScalar = rg.GetNormal()
gaussVector = rg.GetNormal(paramDim)
gaussMatrix = rg.GetNormal(paramDim, numSamps)
# Uniform Samples
uniformScalar = rg.GetUniform()
uniformVector = rg.GetUniform(paramDim)
uniformMatrix = rg.GetUniform(paramDim, numSamps)
# Gamma Samples
gammaAlpha = 0.5
gammaBeta = 1.0
gammaScalar = rg.GetGamma(gammaAlpha, gammaBeta)
gammaVector = rg.GetGamma(gammaAlpha, gammaBeta, paramDim)
gammaMatrix = rg.GetGamma(gammaAlpha, gammaBeta, paramDim, numSamps)
fig, axs = plt.subplots(ncols=3, figsize=(15,5))
axs[0].scatter(gaussMatrix[0,:], gaussMatrix[1,:], alpha=0.3)
axs[0].set_title('Gaussian Samples')
axs[1].scatter(uniformMatrix[0,:], uniformMatrix[1,:], alpha=0.3)
axs[1].set_title('Uniform Samples')
axs[2].scatter(gammaMatrix[0,:], gammaMatrix[1,:], alpha=0.3)
axs[2].set_title('Gamma Samples')
plt.show()
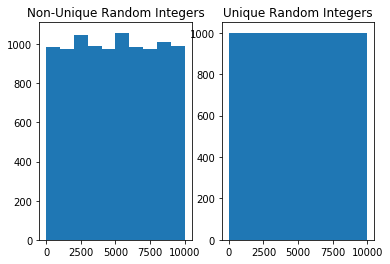
Integer Random Variables
lb = 0
ub = paramDim*numSamps
isUnique = False
intScalar = rg.GetUniformInt(lb,ub)
intVector = rg.GetUniformInt(lb, ub, paramDim, isUnique)
intMatrix = rg.GetUniformInt(lb, ub, paramDim, numSamps, isUnique)
isUnique = True
uniqueIntScalar = rg.GetUniformInt(lb, ub)
uniqueIntVector = rg.GetUniformInt(lb, ub, paramDim, isUnique)
uniqueIntMatrix = rg.GetUniformInt(lb, ub, paramDim, numSamps, isUnique)
fig, axs = plt.subplots(ncols=2)
axs[0].hist(intMatrix.ravel())
axs[0].set_title('Non-Unique Random Integers')
axs[1].hist(uniqueIntMatrix.ravel())
axs[1].set_title('Unique Random Integers')
Text(0.5,1,'Unique Random Integers')
The MUQ ModPiece class
MUQ provides many tools that need to interact with user defined models or model components. The MUQ ModPiece class provides a mechanism for defining models (i.e., input-output relationships) in a way that MUQ can understand. To define a new model, the user creates a class that inherits from the PyModPiece class (or just ModPiece in c++), overrides the EvaluateImpl function, and tells the parent PyModPiece class the size and number of inputs and outputs the new model has. Note that these model components can have multiple inputs and multiple outputs.
For more information on classes and inheritance in Python, check out this introduction.
For example, the following class implements the “Banana” transformation from $z\rightarrow m$.
The EvaluateImpl function takes a list of input vectors and sets the self.outputs member variable, which is also a list of vectors.
The __init__ function in the BananaTrans class must call PyModPiece.__init__ and specify the number of inputs and outputs. The PyModPiece.__init__ function has three inputs:
self- A list of integers specifying the size of each model input
- A list of integers specifying the size of each model output
class BananaTrans(mm.PyModPiece):
def __init__(self, a, b):
mm.PyModPiece.__init__(self, [2], # One input containing 2 components
[2]) # One output containing 2 components
self.a = a
self.b = b
def EvaluateImpl(self, inputs):
z = inputs[0]
m = np.zeros((2))
m[0] = self.a * z[0]
m[1] = z[1]/self.a - self.b*((self.a*z[0])**2 + self.a**2)
self.outputs = [m]
Derivatives in the ModPiece class
Many algorithms require derivative information to be efficient. To add this information to a child of PyModPiece, we can override additional functions. In particular,
- the
JacobianImplfunction can be overridden to implement the Jacobian - the
GradientImplfunction can be overriden to implement Gradients, including adjoint gradients (i.e., computation of $J^Tv$ for some vector $v$) - the
ApplyJacobianImplfunction can be overriden to implement Jacobian actions (i.e., $Jv$)
Below, we override the JacobianImpl function in the inverse banana transformation to provide Jacobian information.
class InvBananaTrans(mm.PyModPiece):
def __init__(self, a, b):
mm.PyModPiece.__init__(self, [2], # One input containing 2 components
[2]) # One output containing 2 components
self.a = a
self.b = b
print(self.a)
def EvaluateImpl(self, inputs):
m = inputs[0]
z = np.zeros((2))
z[0] = m[0]/self.a
z[1] = m[1]*self.a + self.a*self.b*(m[0]**2 + self.a**2)
self.outputs = [z]
def JacobianImpl(self, outDimWrt, inDimWrt, inputs):
m = inputs[0]
self.jacobian = np.array([ [1.0/self.a, 0], [2.0*self.a*self.b*m[0], self.a] ])
# TODO: Override the GradientImpl function, i.e. $J^T v$, where $v$ is the "sens" input
def GradientImpl(self, outDimWrt, inDimWrt, inputs, sens):
# ... Do a bunch of stuff here ...
# self.gradient = ?
self.gradient = self.Jacobian(outDimWrt, inDimWrt, inputs).T @ sens
a = 1.0
b = 1.0
invf = InvBananaTrans(a,b)
# TODO: Test your gradient by comparing it with a finite difference gradient
sens = np.ones((2))
m = np.array([0,-2])
fdGrad = invf.GradientByFD(0,0,[m],sens)
grad = invf.Gradient(0,0,[m],sens)
print('Finite Difference Gradient =\n', fdGrad)
print('Analytical Gradient =\n', grad)
1.0
Finite Difference Gradient =
[ 1. 0.99999999]
Analytical Gradient =
[ 1. 1.]
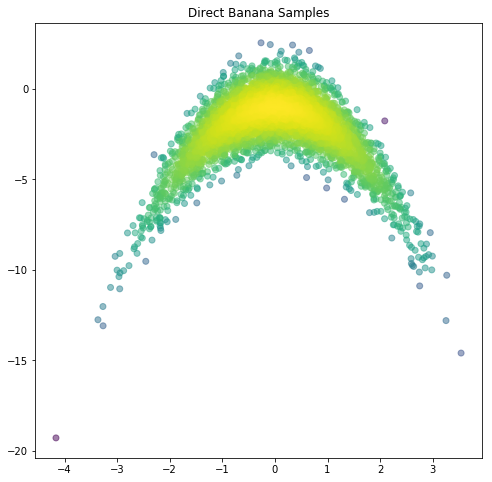
Sampling via Nonlinear Transformations
# Illustration that ModPiece output is a list
f = BananaTrans(a,b)
z = np.array([0,0])
modPieceOutput = f.Evaluate([ z ])
print('Transformation Output = \n', modPieceOutput)
Transformation Output =
[array([ 0., -1.])]
zDist = mm.Gaussian(np.zeros((paramDim)))
# TODO: Use the f object to generate "numSamps" samples of the banana random variable m
# RECALL: The Gaussian class has a Sample() function
mSamps = np.zeros((paramDim, numSamps))
for i in range(numSamps):
mSamps[:,i] = f.Evaluate([ zDist.Sample() ])[0]
# TODO: For each sample above, use the invf compute the value of the banana density
# RECALL: The Gaussian distribution from Friday has a LogDensity(z) function
logDensVals1 = np.zeros(numSamps)
for i in range(numSamps):
jac = invf.Jacobian(0,0, [ mSamps[:,i] ])
z = invf.Evaluate([ mSamps[:,i] ])
logDensVals1[i] = zDist.LogDensity(z) + np.linalg.slogdet(jac)[1]
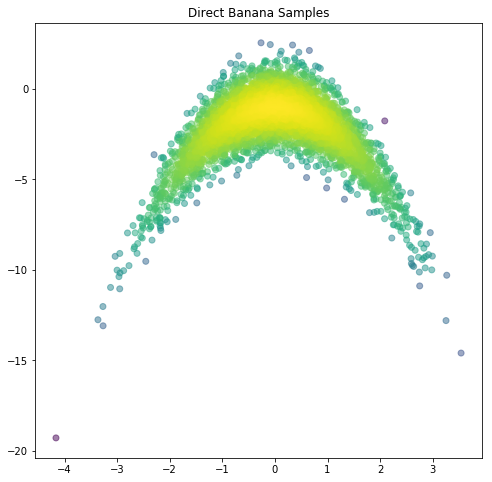
# TODO: Create a scatter plot of the banana samples (hint: use plt.scatter)
plt.figure(figsize=(8,8))
plt.scatter(mSamps[0,:],mSamps[1,:],c=logDensVals1, alpha=0.5)
plt.title('Direct Banana Samples')
plt.show()
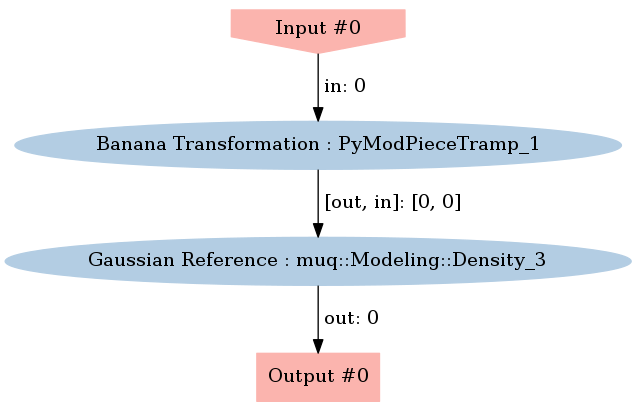
The WorkGraph class
In MUQ, the WorkGraph class allows us to combine multiple model components (i.e., ModPiece instance). Here, we will create a new model that evaluates $\log p_m(m) = \log p_z(T(m))$. We will do this by combining an instance of InvBananaTrans with a Gaussian density.
First, we need to construct a graph with two nodes and one edge.
graph = mm.WorkGraph()
graph.AddNode(zDist.AsDensity(), "Gaussian Reference")
graph.AddNode(invf, "Banana Transformation")
graph.AddEdge("Banana Transformation", 0, "Gaussian Reference", 0)
graph.Visualize("EvaluationGraph.png")
Image(filename='EvaluationGraph.png')
Now that the graph is constructed, we can create the new model (in the form of a ModPiece). Here, we use the CreateModPiece function, but takes the name of the output node as an argument.
tgtDens = graph.CreateModPiece("Gaussian Reference")
# TODO: Use the tgtDens.Evaluate function to evaluate $\log p_m(m)$ at each sample point.
logDensVals2 = np.zeros(numSamps)
for i in range(numSamps):
logDensVals2[i] = tgtDens.Evaluate([ mSamps[:,i] ])[0] # NOTE: This only works because the jacobian is 1
# TODO: Plot the new density evaluations, do they match the results above?
plt.figure(figsize=(8,8))
plt.scatter(mSamps[0,:],mSamps[1,:],c=logDensVals2, alpha=0.5)
plt.title('Direct Banana Samples')
plt.show()
Rejection Sampling
propMu = np.array([0,-4])
propCov = np.array([ [4, 0],
[0, 20]])
propDist = mm.Gaussian(propMu, propCov)
rejectSamps = np.zeros((paramDim, numSamps))
rejectDens = np.zeros((numSamps))
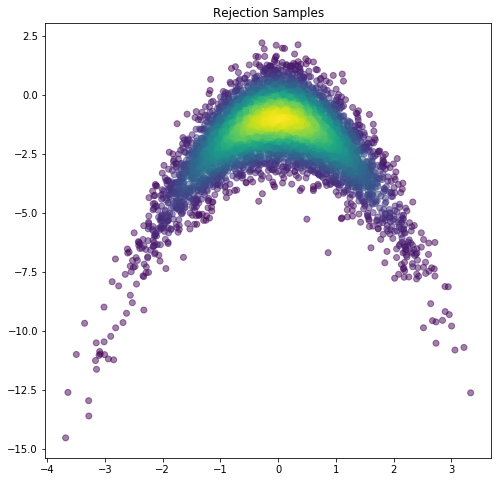
# TODO: Implement a rejection sampler that samples from the banana density.
numAccepts = 0
numProposed = 0
M = np.exp(3)
while(numAccepts < numSamps):
numProposed += 1
# Propose in the banana space
mprop = propDist.Sample()
# Evaluate the log target density
logTgt = tgtDens.Evaluate([ mprop ])[0]
# Evaluate the log proposal density
logProp = propDist.LogDensity(mprop)
# Compute the acceptance ratio
alpha = np.exp(logTgt - np.log(M) - logProp)
assert logTgt < np.log(M) + logProp
# Accept with probability alpha
if(rg.GetUniform() < alpha):
rejectSamps[:,numAccepts] = mprop
rejectDens[numAccepts] = logTgt
numAccepts += 1
print('%d target density evaluations were needed to compute %d samples'%(numProposed, numSamps))
99350 target density evaluations were needed to compute 5000 samples
plt.figure(figsize=(8,8))
plt.scatter(rejectSamps[0,:], rejectSamps[1,:], c=np.exp(rejectDens), alpha=0.5)
plt.title('Rejection Samples')
plt.show()
Markov Chain Monte Carlo Sampling
propMu = np.zeros((paramDim))
propCov = 4.0*np.eye(paramDim)
mcmcProp = mm.Gaussian(propMu, propCov)
mcmcSamps = np.zeros((paramDim, numSamps))
mcmcDens = np.zeros((numSamps))
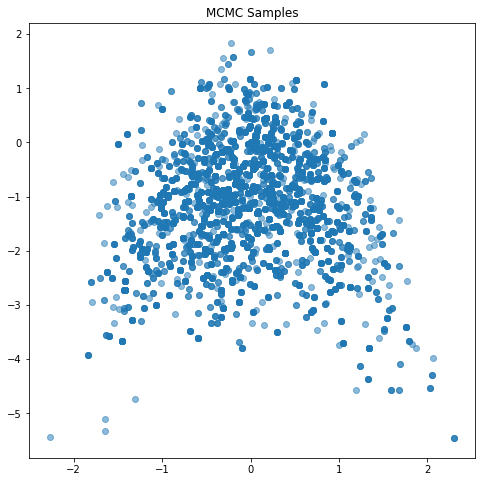
# TODO: Implement a simple random walk Metropolis algorithm to sample from the banana density.
currPt = np.zeros((paramDim))
currLogTgt = tgtDens.Evaluate([currPt])[0]
numAccepts = 0
for i in range(numSamps):
propSamp = mcmcProp.Sample()
propLogTgt = tgtDens.Evaluate([propSamp])[0]
u = np.exp(propLogTgt - currLogTgt)
if(rg.GetUniform() < u):
numAccepts += 1
mcmcSamps[:,i] = propSamp
currPt = propSamp
currLogTgt = propLogTgt
else:
mcmcSamps[:,i] = currPt
print('Acceptance Rate = %f'%(float(numAccepts)/numSamps))
Acceptance Rate = 0.221200
plt.figure(figsize=(8,8))
plt.scatter(mcmcSamps[0,:], mcmcSamps[1,:], alpha=0.5)
plt.title('MCMC Samples')
plt.show()
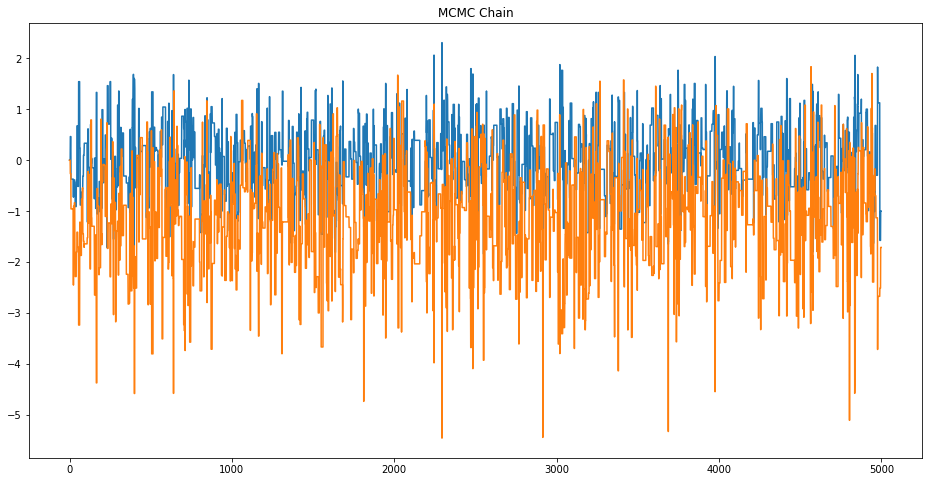
# TODO: Plot the MCMC chain. Does it look like white noise? Should it?
plt.figure(figsize=(16,8))
plt.plot(mcmcSamps[0,:])
plt.plot(mcmcSamps[1,:])
plt.title('MCMC Chain')
plt.show()
Importance Sampling
propMu = np.array([0,-4])
propCov = np.array([ [4, 0],
[0, 20]])
isProp = mm.Gaussian(propMu, propCov)
# TODO: Estimate the Banana density mean using an importance sampler
isSamps = np.zeros((paramDim, numSamps))
isWeights = np.zeros((numSamps))
for i in range(numSamps):
isSamps[:,i] = isProp.Sample()
isWeights[i] = np.exp( tgtDens.Evaluate([isSamps[:,i]])[0] - isProp.LogDensity(isSamps[:,i]) )
plt.figure(figsize=(8,8))
plt.scatter(isSamps[0,:], isSamps[1,:], c=isWeights, alpha=0.5)
plt.title('Importance Sampling Points')
plt.show()
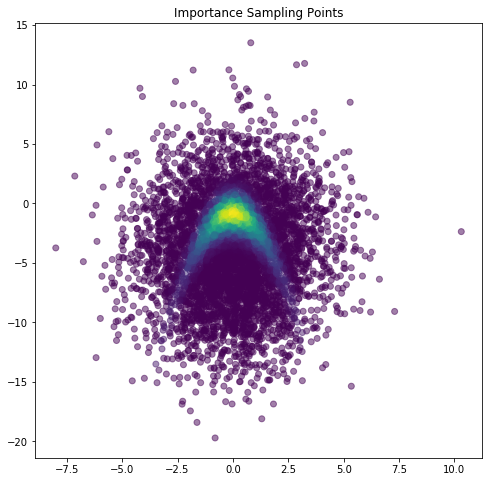
isMean = np.dot(isSamps, isWeights) / np.sum(isWeights)
print('Importance Sampling mean = ', isMean)
Importance Sampling mean = [ 0.04996654 -1.99683488]