Coefficient field inversion in an elliptic partial differential equation
We consider the estimation of a coefficient in an elliptic partial differential equation as a model problem. Depending on the interpretation of the unknowns and the type of measurements, this model problem arises, for instance, in inversion for groundwater flow or heat conductivity. It can also be interpreted as finding a membrane with a certain spatially varying stiffness. Let , be an open, bounded domain and consider the following problem:
where is the solution of
Here denotes the unknown coefficient field, the state variable, the (possibly noisy) data, a given volume force, and the regularization parameter.
The variational (or weak) form of the state equation:
Find such that
where is the space of functions vanishing on with square integrable derivatives.
Above, denotes the -inner product, i.e, for scalar functions defined on we write
and similarly for vector functions defined on we write
Gradient evaluation:
The Lagrangian functional is given by
Then the gradient of the cost functional with respect to the parameter is
where is the solution of the forward problem,
and is the solution of the adjoint problem,
Hessian action:
To evaluate the action of the Hessian is a given direction , we consider variations of the meta-Lagrangian functional
Then action of the Hessian is a given direction is
where
-
and are the solution of the forward and adjoint problem, respectively;
-
is the solution of the incremental forward problem,
- and is the solution of the incremental adjoint problem,
Inexact Newton-CG:
Written in abstract form, the Newton Method computes an update direction by solving the linear system
where the evaluation of the gradient involve the solution and of the forward and adjoint problem (respectively) for . Similarly, the Hessian action requires to additional solve the incremental forward and adjoint problems.
Discrete Newton system:
Let us denote the vectors corresponding to the discretization of the functions by and of the functions by .
Then, the discretization of the above system is given by the following symmetric linear system:
The gradient is computed using the following three steps
- Given we solve the forward problem
where stems from the discretization , and stands for the discretization of the right hand side .
- Given and solve the adjoint problem
where stems from the discretization of , is the mass matrix corresponding to the inner product in the state space, and stems from the data.
- Define the gradient
where is the matrix stemming from discretization of the regularization operator , and stems from discretization of the term .
Similarly the action of the Hessian in a direction (by using the CG algorithm we only need the action of to solve the Newton step) is given by
- Solve the incremental forward problem
where stems from discretization of .
- Solve the incremental adjoint problem
where stems for the discretization of .
- Define the Hessian action
Goals:
By the end of this notebook, you should be able to:
- solve the forward and adjoint Poisson equations
- understand the inverse method framework
- visualise and understand the results
- modify the problem and code
Mathematical tools used:
- Finite element method
- Derivation of gradiant and Hessian via the adjoint method
- inexact Newton-CG
- Armijo line search
Import dependencies
import dolfin as dl
import numpy as np
from hippylib import *
import logging
import matplotlib.pyplot as plt
%matplotlib inline
logging.getLogger('FFC').setLevel(logging.WARNING)
logging.getLogger('UFL').setLevel(logging.WARNING)
dl.set_log_active(False)
Model set up:
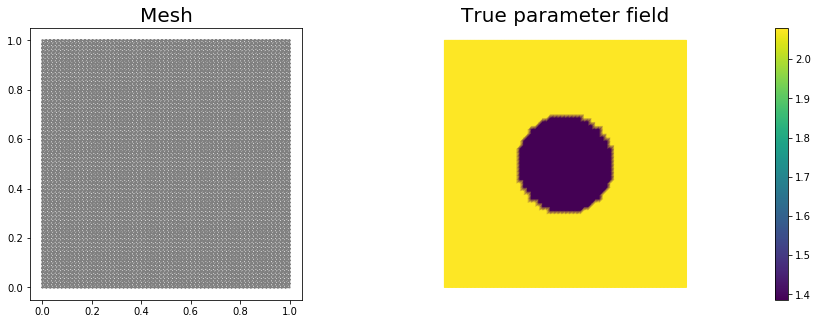
As in the introduction, the first thing we need to do is set up the numerical model. In this cell, we set the mesh, the finite element functions corresponding to state, parameter and adjoint variables, and the corresponding test functions and the parameters for the optimization.
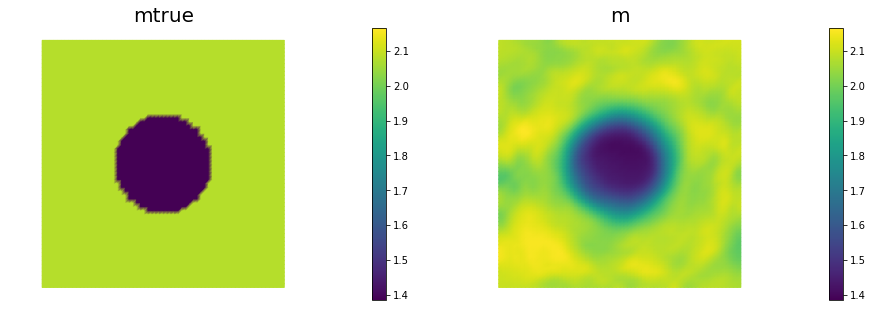
The true parameter mtrue is the finite element interpolant of the function
The forcing term f and the boundary conditions u0 for the forward problem are
# create mesh and define function spaces
nx = 64
ny = 64
mesh = dl.UnitSquareMesh(nx, ny)
Vm = dl.FunctionSpace(mesh, 'Lagrange', 1)
Vu = dl.FunctionSpace(mesh, 'Lagrange', 2)
# The true and initial guess inverted parameter
mtrue = dl.interpolate(dl.Expression('std::log( 8. - 4.*(pow(x[0] - 0.5,2) + pow(x[1] - 0.5,2) < pow(0.2,2) ) )', degree=5), Vm)
# define function for state and adjoint
u = dl.Function(Vu)
m = dl.Function(Vm)
p = dl.Function(Vu)
# define Trial and Test Functions
u_trial, m_trial, p_trial = dl.TrialFunction(Vu), dl.TrialFunction(Vm), dl.TrialFunction(Vu)
u_test, m_test, p_test = dl.TestFunction(Vu), dl.TestFunction(Vm), dl.TestFunction(Vu)
# initialize input functions
f = dl.Constant(1.0)
u0 = dl.Constant(0.0)
# plot
plt.figure(figsize=(15,5))
nb.plot(mesh,subplot_loc=121, mytitle="Mesh", show_axis='on')
nb.plot(mtrue,subplot_loc=122, mytitle="True parameter field")
plt.show()
# set up dirichlet boundary conditions
def boundary(x,on_boundary):
return on_boundary
bc_state = dl.DirichletBC(Vu, u0, boundary)
bc_adj = dl.DirichletBC(Vu, dl.Constant(0.), boundary)
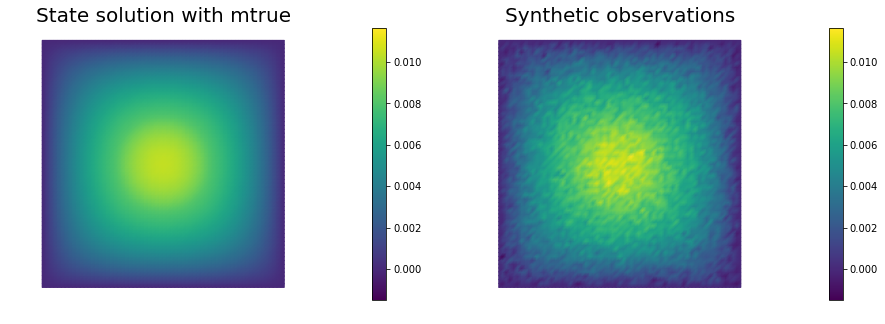
Set up synthetic observations:
- Propose a coefficient field shown above
-
The weak form of the PDE:
Find such that
- Perturb the solution: , where
# noise level
noise_level = 0.05
# weak form for setting up the synthetic observations
a_true = dl.inner(dl.exp(mtrue) * dl.grad(u_trial), dl.grad(u_test)) * dl.dx
L_true = f * u_test * dl.dx
# solve the forward/state problem to generate synthetic observations
A_true, b_true = dl.assemble_system(a_true, L_true, bc_state)
utrue = dl.Function(Vu)
dl.solve(A_true, utrue.vector(), b_true)
ud = dl.Function(Vu)
ud.assign(utrue)
# perturb state solution and create synthetic measurements ud
# ud = u + ||u||/SNR * random.normal
MAX = ud.vector().norm("linf")
noise = dl.Vector()
A_true.init_vector(noise,1)
noise.set_local( noise_level * MAX * np.random.normal(0, 1, len(ud.vector().get_local())) )
bc_adj.apply(noise)
ud.vector().axpy(1., noise)
# plot
nb.multi1_plot([utrue, ud], ["State solution with mtrue", "Synthetic observations"])
plt.show()
The cost function evaluation:
# regularization parameter
gamma = 1e-8
# define cost function
def cost(u, ud, m,gamma):
reg = 0.5*gamma * dl.assemble( dl.inner(dl.grad(m), dl.grad(m))*dl.dx )
misfit = 0.5 * dl.assemble( (u-ud)**2*dl.dx)
return [reg + misfit, misfit, reg]
Setting up the variational form for the state/adjoint equations and gradient evaluation
Below we define the variational forms that appears in the the state/adjoint equations and gradient evaluations.
Specifically,
a_state,L_statestand for the bilinear and linear form of the state equation, repectively;a_adj,L_adjstand for the bilinear and linear form of the adjoint equation, repectively;CTvarf,gradRvarfstand for the contributions to the gradient coming from the PDE and the regularization, respectively.
We also build the mass matrix that is used to discretize the inner product.
# weak form for setting up the state equation
a_state = dl.inner(dl.exp(m) * dl.grad(u_trial), dl.grad(u_test)) * dl.dx
L_state = f * u_test * dl.dx
# weak form for setting up the adjoint equation
a_adj = dl.inner(dl.exp(m) * dl.grad(p_trial), dl.grad(p_test)) * dl.dx
L_adj = -dl.inner(u - ud, p_test) * dl.dx
# weak form for gradient
CTvarf = dl.inner(dl.exp(m)*m_test*dl.grad(u), dl.grad(p)) * dl.dx
gradRvarf = gamma*dl.inner(dl.grad(m), dl.grad(m_test))*dl.dx
# L^2 weighted inner product
M_varf = dl.inner(m_trial, m_test) * dl.dx
M = dl.assemble(M_varf)
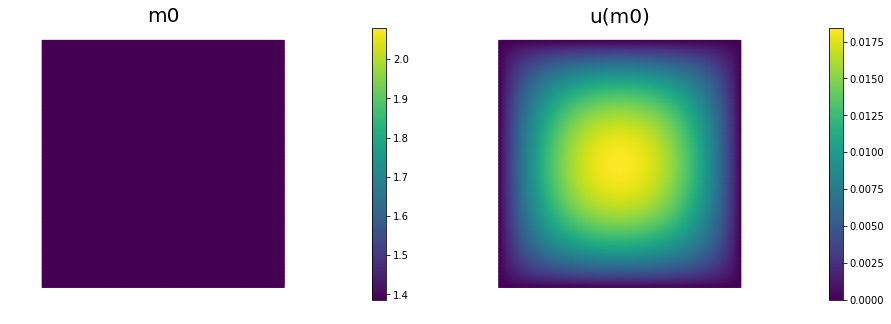
Initial guess
We solve the state equation and compute the cost functional for the initial guess of the parameter m0
m0 = dl.interpolate(dl.Constant(np.log(4.) ), Vm )
m.assign(m0)
# solve state equation
state_A, state_b = dl.assemble_system (a_state, L_state, bc_state)
dl.solve (state_A, u.vector(), state_b)
# evaluate cost
[cost_old, misfit_old, reg_old] = cost(u, ud, m, gamma)
# plot
plt.figure(figsize=(15,5))
nb.plot(m,subplot_loc=121, mytitle="m0", vmin=mtrue.vector().min(), vmax=mtrue.vector().max())
nb.plot(u,subplot_loc=122, mytitle="u(m0)")
plt.show()
Variational forms for Hessian action
We define the following variational forms that are needed for the Hessian evaluation
-
W_varf,R_varfare the second variation of the data-misfit and regularization component of the cost functional respectively (note sinceW_varf,R_varfare independent of , , they can be preassembled); -
C_varfis the second variation of the PDE with respect to and ; -
Wum_varfis the second variation of the PDE with respect to and ; -
Wmm_varfis the second variation of the PDE with respect to .
Note: Since the forward problem is linear, the bilinear forms for the incremental state and adjoint equations are the same as the bilinear forms for the state and adjoint equations, respectively.
W_varf = dl.inner(u_trial, u_test) * dl.dx
R_varf = dl.Constant(gamma) * dl.inner(dl.grad(m_trial), dl.grad(m_test)) * dl.dx
C_varf = dl.inner(dl.exp(m) * m_trial * dl.grad(u), dl.grad(u_test)) * dl.dx
Wum_varf = dl.inner(dl.exp(m) * m_trial * dl.grad(p_test), dl.grad(p)) * dl.dx
Wmm_varf = dl.inner(dl.exp(m) * m_trial * m_test * dl.grad(u), dl.grad(p)) * dl.dx
# Assemble constant matrices
W = dl.assemble(W_varf)
R = dl.assemble(R_varf)
Hessian action on a vector :
Here we describe how to apply the Hessian operator to a vector . For an opportune choice of the regularization, the Hessian operator evaluated in a neighborhood of the solution is positive define, whereas far from the solution the reduced Hessian may be indefinite. On the constrary, the Gauss-Newton approximation of the Hessian is always positive defined.
For this reason, it is beneficial to perform a few initial Gauss-Newton steps (5 in this particular example) to accelerate the convergence of the inexact Newton-CG algorithm.
The Hessian action reads:
The Gauss-Newton Hessian action is obtained by dropping the second derivatives operators , , and :
# Class HessianOperator to perform Hessian apply to a vector
class HessianOperator():
cgiter = 0
def __init__(self, R, Wmm, C, A, adj_A, W, Wum, bc0, use_gaussnewton=False):
self.R = R
self.Wmm = Wmm
self.C = C
self.A = A
self.adj_A = adj_A
self.W = W
self.Wum = Wum
self.bc0 = bc0
self.use_gaussnewton = use_gaussnewton
# incremental state
self.du = dl.Vector()
self.A.init_vector(self.du,0)
#incremental adjoint
self.dp = dl.Vector()
self.adj_A.init_vector(self.dp,0)
# auxiliary vector
self.Wum_du = dl.Vector()
self.Wum.init_vector(self.Wum_du, 1)
def init_vector(self, v, dim):
self.R.init_vector(v,dim)
# Hessian performed on v, output as generic vector y
def mult(self, v, y):
self.cgiter += 1
y.zero()
if self.use_gaussnewton:
self.mult_GaussNewton(v,y)
else:
self.mult_Newton(v,y)
# define (Gauss-Newton) Hessian apply H * v
def mult_GaussNewton(self, v, y):
#incremental forward
rhs = -(self.C * v)
self.bc0.apply(rhs)
dl.solve (self.A, self.du, rhs)
#incremental adjoint
rhs = - (self.W * self.du)
self.bc0.apply(rhs)
dl.solve (self.adj_A, self.dp, rhs)
# Misfit term
self.C.transpmult(self.dp, y)
if self.R:
Rv = self.R*v
y.axpy(1, Rv)
# define (Newton) Hessian apply H * v
def mult_Newton(self, v, y):
#incremental forward
rhs = -(self.C * v)
self.bc0.apply(rhs)
dl.solve (self.A, self.du, rhs)
#incremental adjoint
rhs = -(self.W * self.du) - self.Wum * v
self.bc0.apply(rhs)
dl.solve (self.adj_A, self.dp, rhs)
#Misfit term
self.C.transpmult(self.dp, y)
self.Wum.transpmult(self.du, self.Wum_du)
y.axpy(1., self.Wum_du)
y.axpy(1., self.Wmm*v)
#Reg/Prior term
if self.R:
y.axpy(1., self.R*v)
The inexact Newton-CG optimization with Armijo line search:
We solve the constrained optimization problem using the inexact Newton-CG method with Armijo line search.
The stopping criterion is based on a relative reduction of the norm of the gradient (i.e. ).
First, we compute the gradient by solving the state and adjoint equation for the current parameter , and then substituing the current state , parameter and adjoint variables in the weak form expression of the gradient:
Then, we compute the Newton direction by iteratively solving . The Newton system is solved inexactly by early termination of conjugate gradient iterations via Eisenstat–Walker (to prevent oversolving) and Steihaug (to avoid negative curvature) criteria.
Usually, one uses the regularization matrix as preconditioner for the Hessian system, however since is singular (the constant vector is in the null space of ), here we use , where is the mass matrix in parameter space.
Finally, the Armijo line search uses backtracking to find such that a sufficient reduction in the cost functional is achieved. More specifically, we use backtracking to find such that:
# define parameters for the optimization
tol = 1e-8
c = 1e-4
maxiter = 12
plot_on = False
# initialize iter counters
iter = 1
total_cg_iter = 0
converged = False
# initializations
g, m_delta = dl.Vector(), dl.Vector()
R.init_vector(m_delta,0)
R.init_vector(g,0)
m_prev = dl.Function(Vm)
print( "Nit CGit cost misfit reg sqrt(-G*D) ||grad|| alpha tolcg" )
while iter < maxiter and not converged:
# solve the adoint problem
adjoint_A, adjoint_RHS = dl.assemble_system(a_adj, L_adj, bc_adj)
dl.solve(adjoint_A, p.vector(), adjoint_RHS)
# evaluate the gradient
MG = dl.assemble(CTvarf + gradRvarf)
# calculate the L^2 norm of the gradient
dl.solve(M, g, MG)
grad2 = g.inner(MG)
gradnorm = np.sqrt(grad2)
# set the CG tolerance (use Eisenstat–Walker termination criterion)
if iter == 1:
gradnorm_ini = gradnorm
tolcg = min(0.5, np.sqrt(gradnorm/gradnorm_ini))
# assemble W_um and W_mm
C = dl.assemble(C_varf)
Wum = dl.assemble(Wum_varf)
Wmm = dl.assemble(Wmm_varf)
# define the Hessian apply operator (with preconditioner)
Hess_Apply = HessianOperator(R, Wmm, C, state_A, adjoint_A, W, Wum, bc_adj, use_gaussnewton=(iter<6) )
P = R + 0.1*gamma * M
Psolver = dl.PETScKrylovSolver("cg", amg_method())
Psolver.set_operator(P)
solver = CGSolverSteihaug()
solver.set_operator(Hess_Apply)
solver.set_preconditioner(Psolver)
solver.parameters["rel_tolerance"] = tolcg
solver.parameters["zero_initial_guess"] = True
solver.parameters["print_level"] = -1
# solve the Newton system H a_delta = - MG
solver.solve(m_delta, -MG)
total_cg_iter += Hess_Apply.cgiter
# linesearch
alpha = 1
descent = 0
no_backtrack = 0
m_prev.assign(m)
while descent == 0 and no_backtrack < 10:
m.vector().axpy(alpha, m_delta )
# solve the state/forward problem
state_A, state_b = dl.assemble_system(a_state, L_state, bc_state)
dl.solve(state_A, u.vector(), state_b)
# evaluate cost
[cost_new, misfit_new, reg_new] = cost(u, ud, m, gamma)
# check if Armijo conditions are satisfied
if cost_new < cost_old + alpha * c * MG.inner(m_delta):
cost_old = cost_new
descent = 1
else:
no_backtrack += 1
alpha *= 0.5
m.assign(m_prev) # reset a
# calculate sqrt(-G * D)
graddir = np.sqrt(- MG.inner(m_delta) )
sp = ""
print( "%2d %2s %2d %3s %8.5e %1s %8.5e %1s %8.5e %1s %8.5e %1s %8.5e %1s %5.2f %1s %5.3e" % \
(iter, sp, Hess_Apply.cgiter, sp, cost_new, sp, misfit_new, sp, reg_new, sp, \
graddir, sp, gradnorm, sp, alpha, sp, tolcg) )
if plot_on:
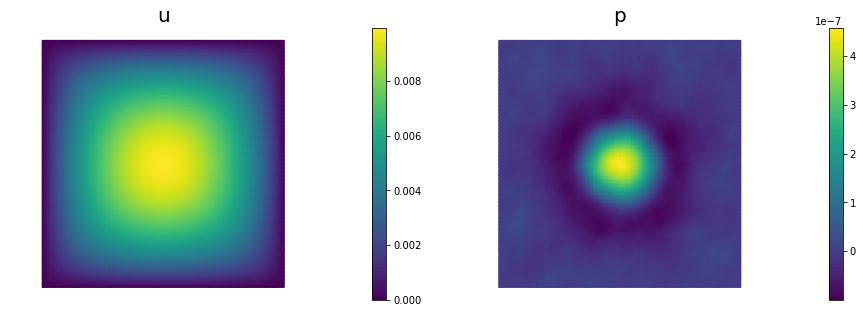
nb.multi1_plot([m,u,p], ["m","u","p"], same_colorbar=False)
plt.show()
# check for convergence
if gradnorm < tol and iter > 1:
converged = True
print( "Newton's method converged in ",iter," iterations" )
print( "Total number of CG iterations: ", total_cg_iter )
iter += 1
if not converged:
print( "Newton's method did not converge in ", maxiter, " iterations" )
Nit CGit cost misfit reg sqrt(-G*D) ||grad|| alpha tolcg
1 1 6.60543e-07 6.60543e-07 5.73978e-14 5.03905e-03 6.10768e-05 1.00 5.000e-01
2 1 1.09971e-07 1.09970e-07 1.05944e-13 1.05263e-03 7.93019e-06 1.00 3.603e-01
3 1 1.06533e-07 1.06533e-07 1.15300e-13 8.29208e-05 6.72435e-07 1.00 1.049e-01
4 10 9.42019e-08 9.08131e-08 3.38884e-09 1.51655e-04 2.67978e-07 1.00 6.624e-02
5 1 9.41547e-08 9.07658e-08 3.38892e-09 9.72005e-06 6.45440e-08 1.00 3.251e-02
6 15 9.40734e-08 9.02137e-08 3.85976e-09 1.27564e-05 2.58250e-08 1.00 2.056e-02
7 12 9.40734e-08 9.02163e-08 3.85710e-09 1.81223e-07 5.38361e-10 1.00 2.969e-03
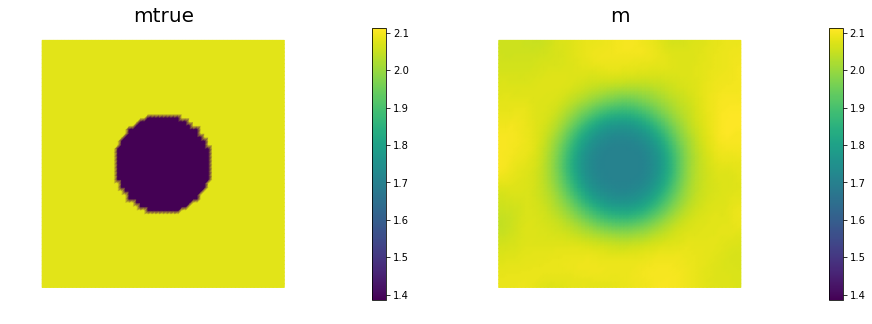
Newton's method converged in 7 iterations
Total number of CG iterations: 41
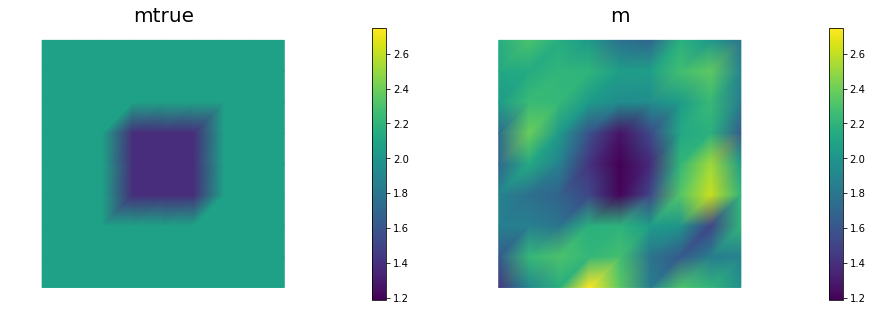
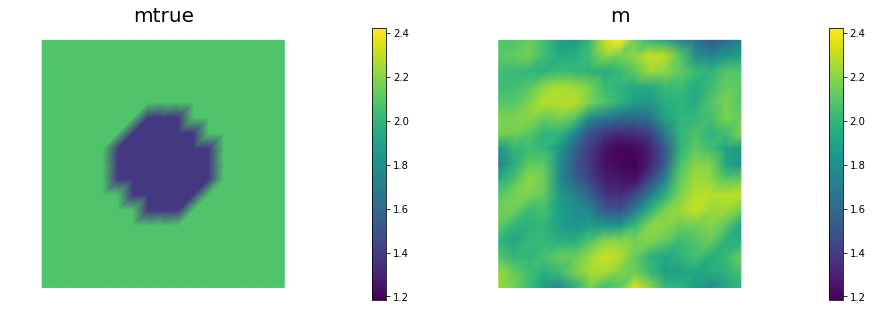
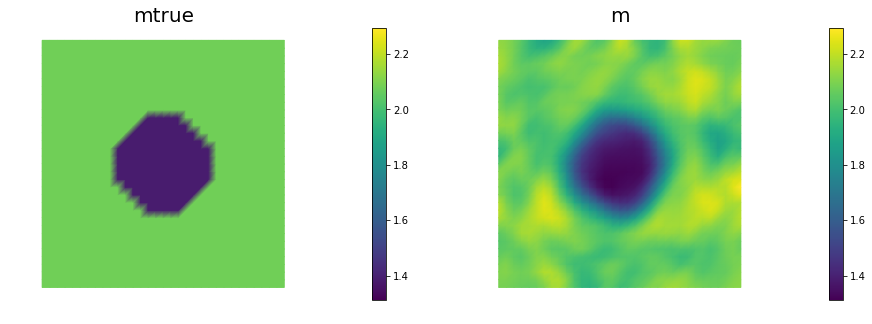
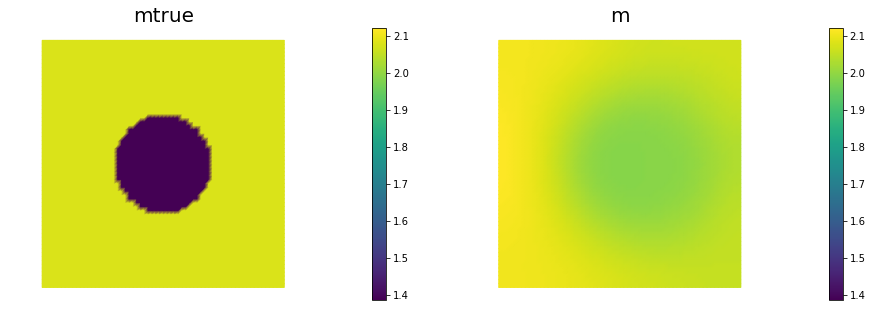
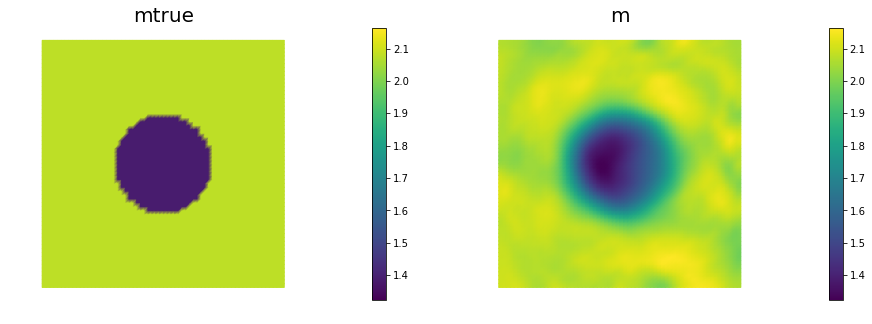
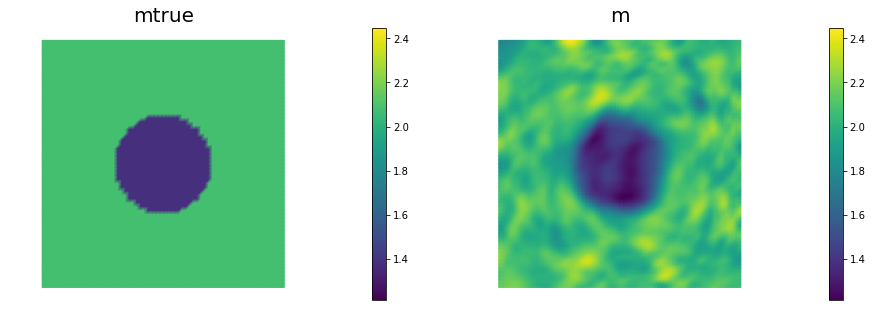
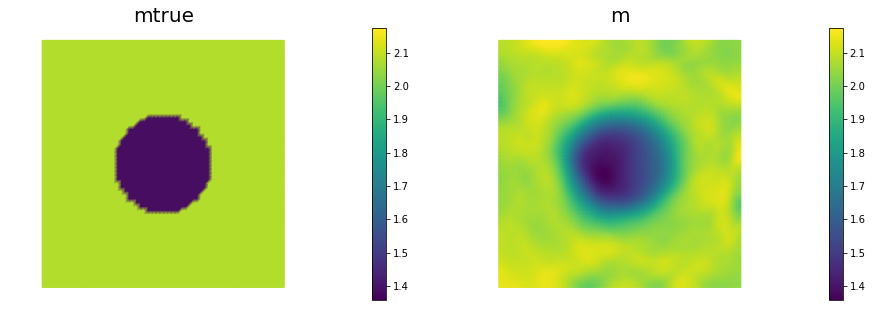
nb.multi1_plot([mtrue, m], ["mtrue", "m"])
nb.multi1_plot([u,p], ["u","p"], same_colorbar=False)
plt.show()
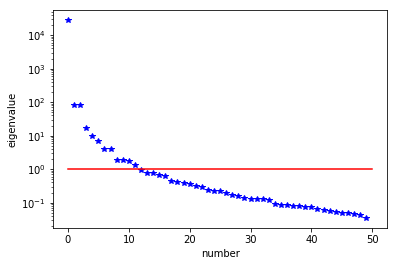
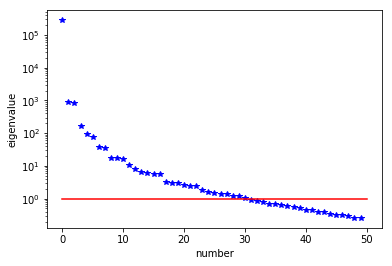
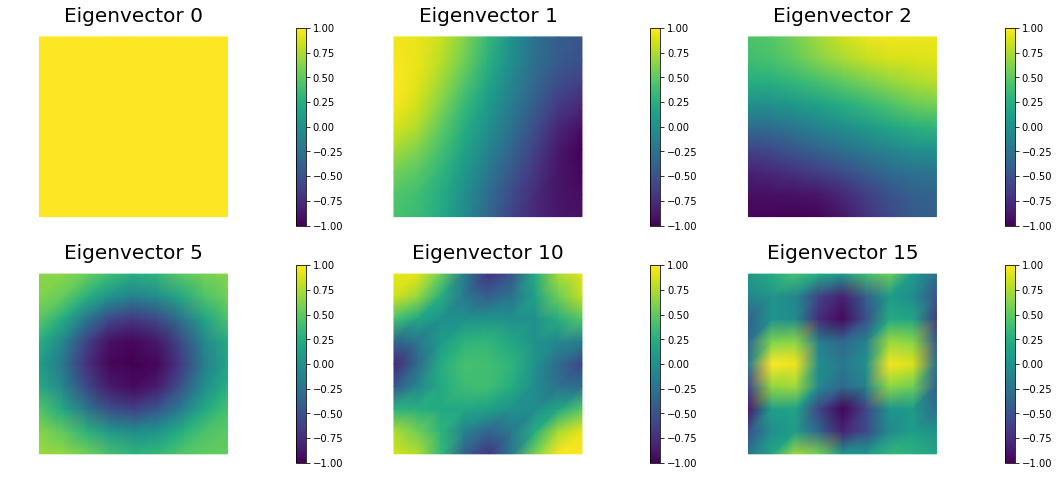
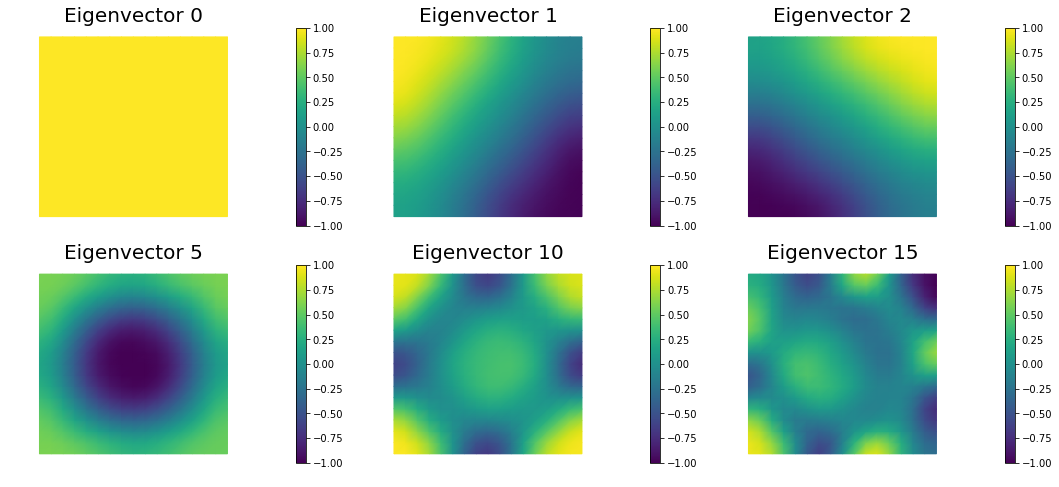
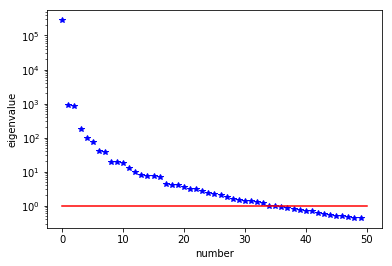
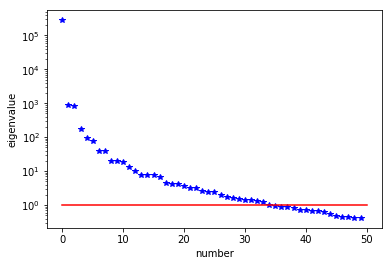
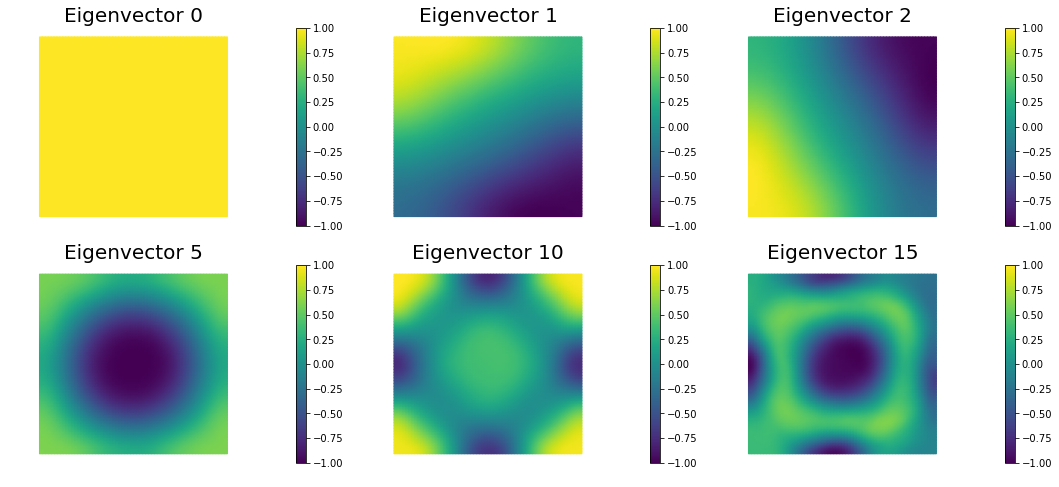
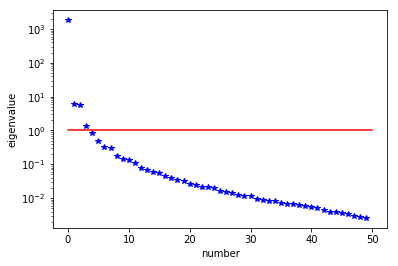
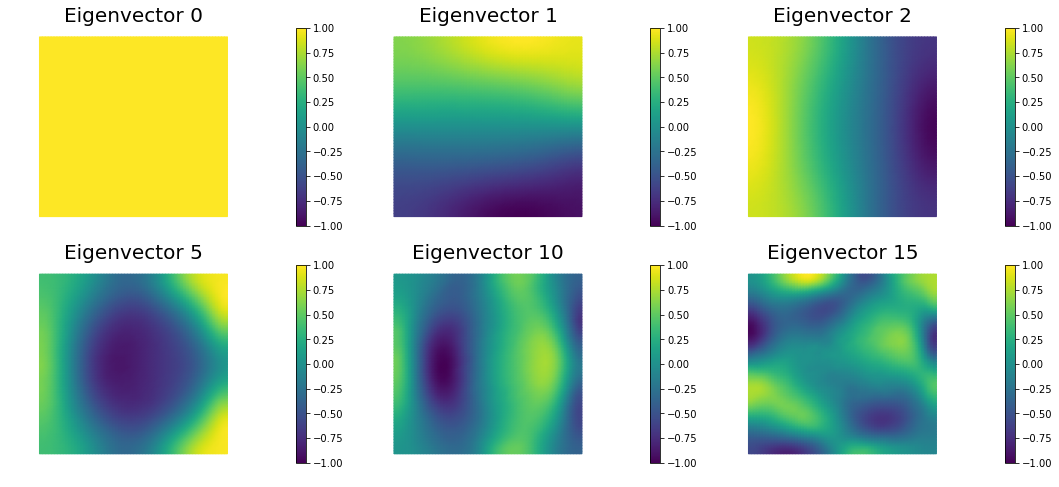
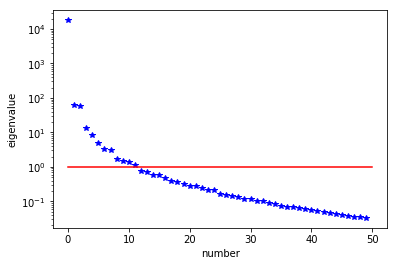
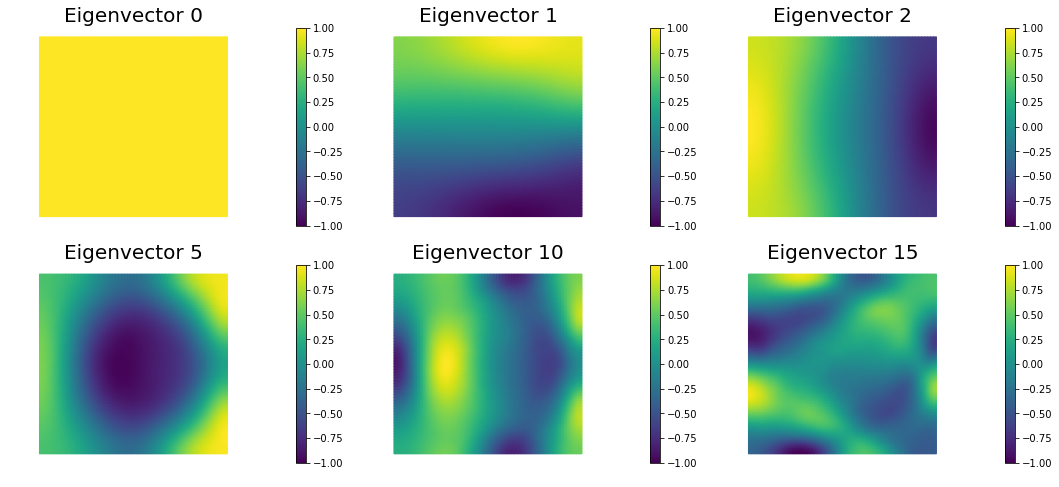
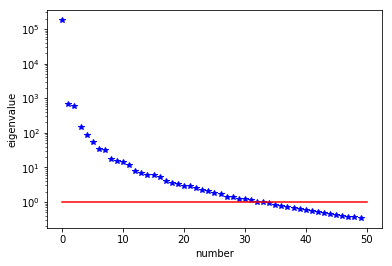
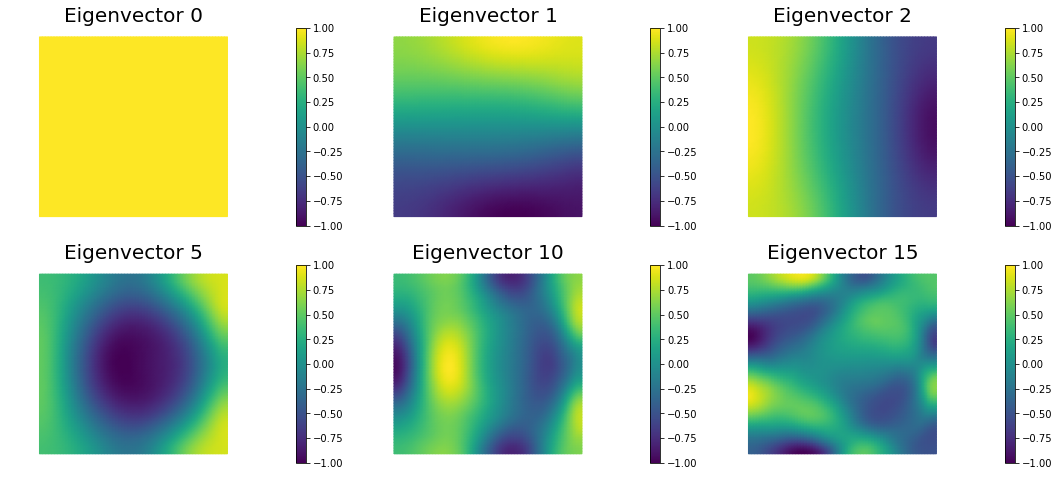
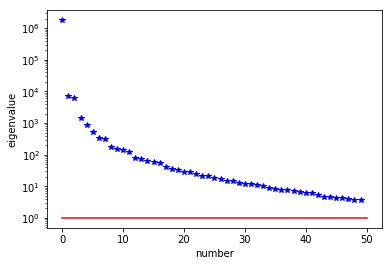
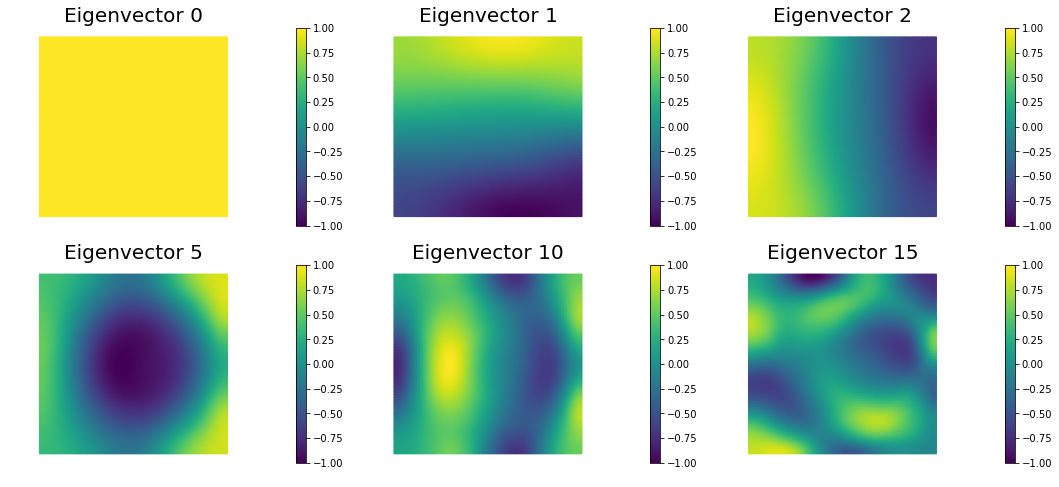
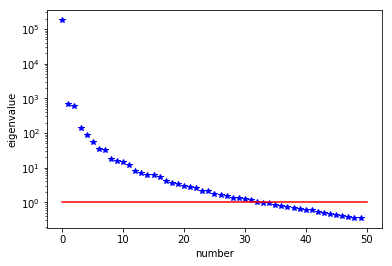
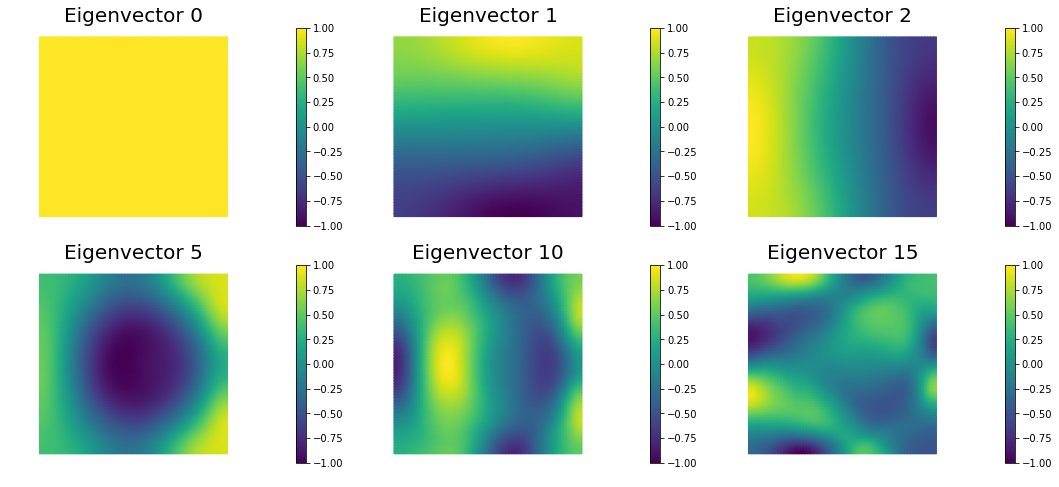
The generalized eigenvalues and eigenvectors of the Hessian misfit
We used the double pass randomized algorithm to compute the generalized eigenvalues and eigenvectors of the Hessian misfit. In particular, we solve
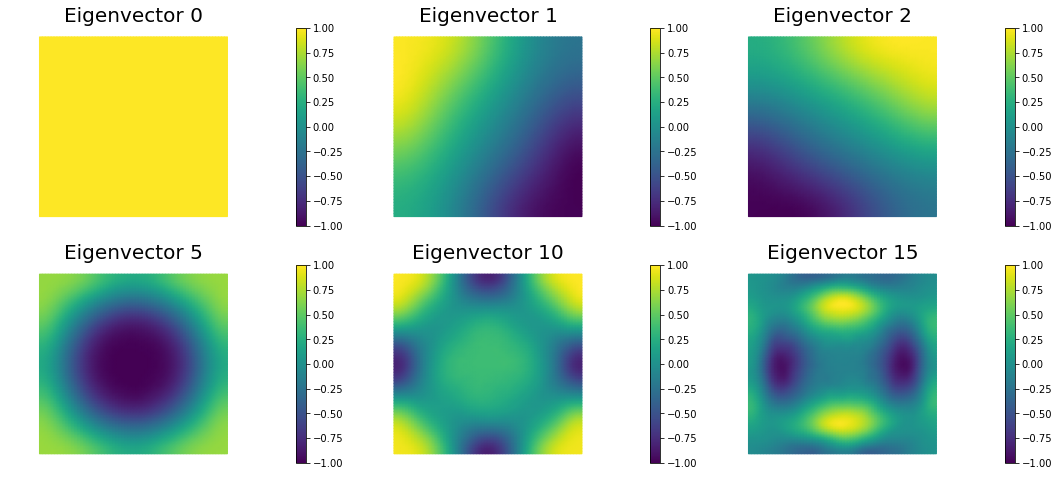
The Figure shows the largest k generalized eigenvectors of the Hessian misfit. The effective rank of the Hessian misfit is the number of eigenvalues above the red line (). The effective rank is independent of the mesh size.
Note: Since is singular (the constant are in the null space of ), we will add a small mass matrix to and use instead.
Hmisfit = HessianOperator(None, Wmm, C, state_A, adjoint_A, W, Wum, bc_adj, use_gaussnewton=False)
k = 50
p = 20
print( "Double Pass Algorithm. Requested eigenvectors: {0}; Oversampling {1}.".format(k,p) )
Omega = MultiVector(m.vector(), k+p)
parRandom.normal(1., Omega)
lmbda, evecs = doublePassG(Hmisfit, P, Psolver, Omega, k)
plt.plot(range(0,k), lmbda, 'b*', range(0,k+1), np.ones(k+1), '-r')
plt.yscale('log')
plt.xlabel('number')
plt.ylabel('eigenvalue')
nb.plot_eigenvectors(Vm, evecs, mytitle="Eigenvector", which=[0,1,2,5,10,15])
Double Pass Algorithm. Requested eigenvectors: 50; Oversampling 20.
Hands on
Question 1
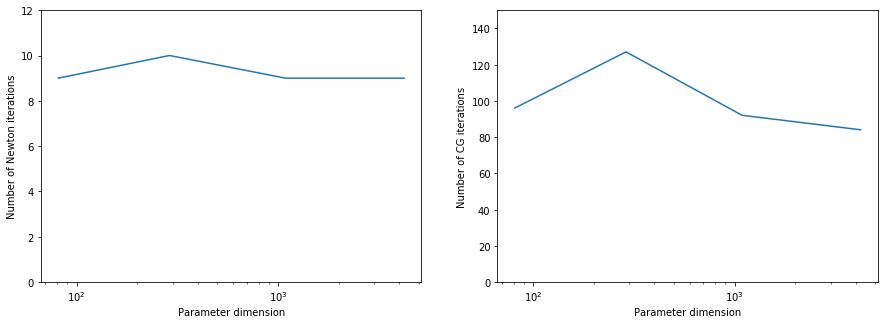
Report the number of inexact Newton and of total CG iterations for a discretization of the domain with , , , finite elements and give the number of unknowns used to discretize the log diffusivity field m for each of these meshes. Discuss how the number of iterations changes as the inversion parameter mesh is refined, i.e., as the parameter dimension increases. Is inexact Newton-CG method scalable with respect to the parameter dimension?
The number of inexact Newton and of total CG iterations is independent of the resolution of the spacial discretization. This means that inexact Newton-CG method scalable with respect to the parameter dimension, i.e. the cost of solving the inverse problem (measured in terms of number of PDE solves) is independent of the mesh size.
Question 2
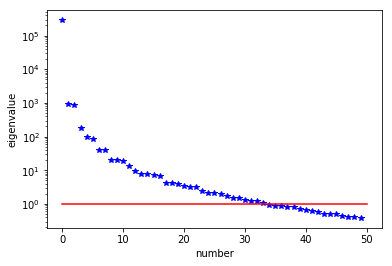
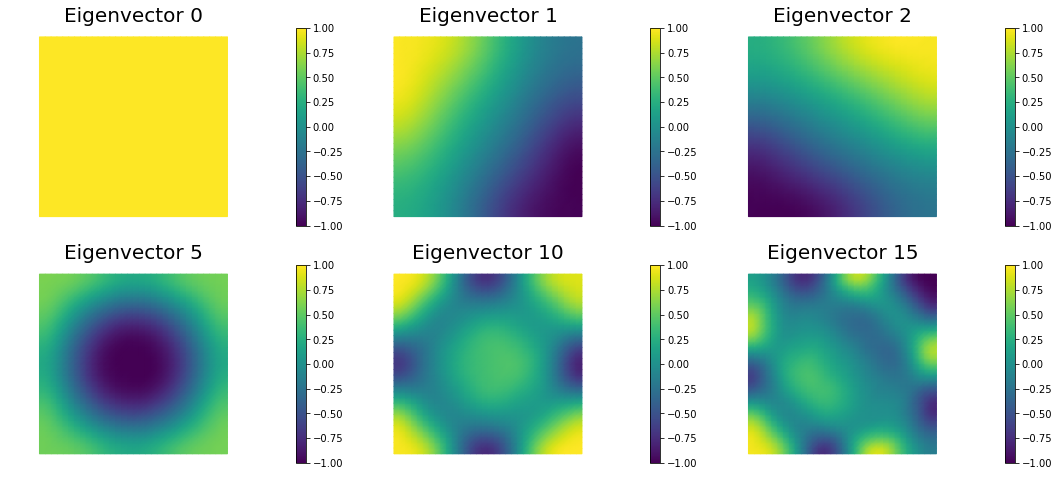
Compute the generalized eigenvalues and eigenvectors of the Hessian misfit at the solution of the inverse problem for a discretization of the domain with , , , finite elements. What do you observe?
The dominant generalized eigenvalues and eigenvectors look the same at different spatial resolution. This is a well-studied spectral property of the Hessian misfit.
Question 3
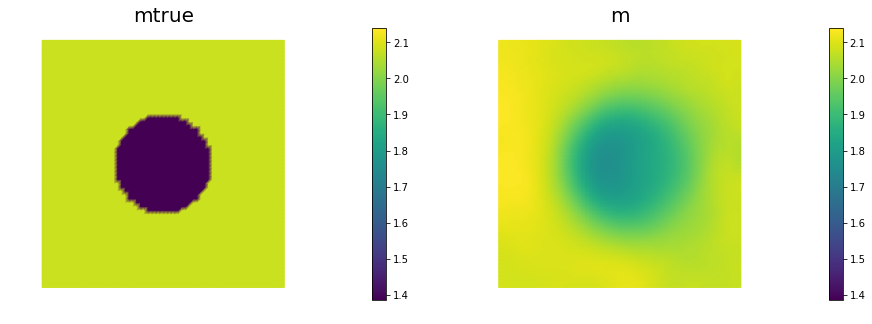
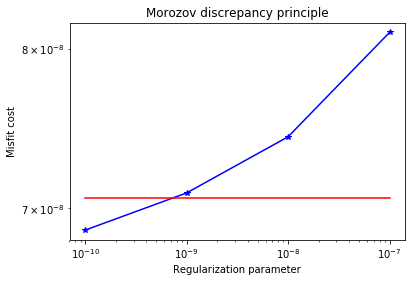
Add the advective term to the inverse problem and its hIPPYlib/FEniCS implementation and plot the resulting reconstruction of for a noise level of 0.01 and for a reasonably chosen regularization parameter. The optimal regularization parameter can be found manually (i.e., by experimenting with a few different values and finding the one that results in a reconstruction that best matches the true log diffusivity field), or else by the discrepancy principle, if you are so inclined.
See function def AddDiffInverseProblem(nx, ny, v, gamma) for the implementation. Using Morozov’s discrepancy principle we chose the regularization parameter .
def AddDiffInverseProblem(nx, ny, gamma, v):
mesh = dl.UnitSquareMesh(nx, ny)
Vm = dl.FunctionSpace(mesh, 'Lagrange', 1)
Vu = dl.FunctionSpace(mesh, 'Lagrange', 2)
# The true and initial guess inverted parameter
mtrue = dl.interpolate(dl.Expression('std::log( 8. - 4.*(pow(x[0] - 0.5,2) + pow(x[1] - 0.5,2) < pow(0.2,2) ) )', degree=5), Vm)
# define function for state and adjoint
u = dl.Function(Vu)
m = dl.Function(Vm)
p = dl.Function(Vu)
# define Trial and Test Functions
u_trial, m_trial, p_trial = dl.TrialFunction(Vu), dl.TrialFunction(Vm), dl.TrialFunction(Vu)
u_test, m_test, p_test = dl.TestFunction(Vu), dl.TestFunction(Vm), dl.TestFunction(Vu)
# initialize input functions
f = dl.Constant(1.0)
u0 = dl.Constant(0.0)
# set up dirichlet boundary conditions
def boundary(x,on_boundary):
return on_boundary
bc_state = dl.DirichletBC(Vu, u0, boundary)
bc_adj = dl.DirichletBC(Vu, dl.Constant(0.), boundary)
# noise level
noise_level = 0.05
# weak form for setting up the synthetic observations
a_true = dl.inner(dl.exp(mtrue) * dl.grad(u_trial), dl.grad(u_test)) * dl.dx \
+ dl.dot(v, dl.grad(u_trial))*u_test*dl.dx
L_true = f * u_test * dl.dx
# solve the forward/state problem to generate synthetic observations
A_true, b_true = dl.assemble_system(a_true, L_true, bc_state)
utrue = dl.Function(Vu)
dl.solve(A_true, utrue.vector(), b_true)
ud = dl.Function(Vu)
ud.assign(utrue)
# perturb state solution and create synthetic measurements ud
# ud = u + ||u||/SNR * random.normal
MAX = ud.vector().norm("linf")
noise = dl.Vector()
A_true.init_vector(noise,1)
noise.set_local( noise_level * MAX * np.random.normal(0, 1, len(ud.vector().get_local())) )
bc_adj.apply(noise)
ud.vector().axpy(1., noise)
# define cost function
def cost(u, ud, m,gamma):
reg = 0.5*gamma * dl.assemble( dl.inner(dl.grad(m), dl.grad(m))*dl.dx )
misfit = 0.5 * dl.assemble( (u-ud)**2*dl.dx)
return [reg + misfit, misfit, reg]
# weak form for setting up the state equation
a_state = dl.inner(dl.exp(m) * dl.grad(u_trial), dl.grad(u_test)) * dl.dx \
+ dl.dot(v, dl.grad(u_trial))*u_test*dl.dx
L_state = f * u_test * dl.dx
# weak form for setting up the adjoint equation
a_adj = dl.inner(dl.exp(m) * dl.grad(p_trial), dl.grad(p_test)) * dl.dx \
+ dl.dot(v, dl.grad(p_test))*p_trial*dl.dx
L_adj = -dl.inner(u - ud, p_test) * dl.dx
# weak form for gradient
CTvarf = dl.inner(dl.exp(m)*m_test*dl.grad(u), dl.grad(p)) * dl.dx
gradRvarf = gamma*dl.inner(dl.grad(m), dl.grad(m_test))*dl.dx
# L^2 weighted inner product
M_varf = dl.inner(m_trial, m_test) * dl.dx
M = dl.assemble(M_varf)
m0 = dl.interpolate(dl.Constant(np.log(4.) ), Vm )
m.assign(m0)
# solve state equation
state_A, state_b = dl.assemble_system (a_state, L_state, bc_state)
dl.solve (state_A, u.vector(), state_b)
# evaluate cost
[cost_old, misfit_old, reg_old] = cost(u, ud, m, gamma)
#Hessian varfs
W_varf = dl.inner(u_trial, u_test) * dl.dx
R_varf = dl.Constant(gamma) * dl.inner(dl.grad(m_trial), dl.grad(m_test)) * dl.dx
C_varf = dl.inner(dl.exp(m) * m_trial * dl.grad(u), dl.grad(u_test)) * dl.dx
Wum_varf = dl.inner(dl.exp(m) * m_trial * dl.grad(p_test), dl.grad(p)) * dl.dx
Wmm_varf = dl.inner(dl.exp(m) * m_trial * m_test * dl.grad(u), dl.grad(p)) * dl.dx
# Assemble constant matrices
W = dl.assemble(W_varf)
R = dl.assemble(R_varf)
# define parameters for the optimization
tol = 1e-8
c = 1e-4
maxiter = 12
# initialize iter counters
iter = 1
total_cg_iter = 0
converged = False
# initializations
g, m_delta = dl.Vector(), dl.Vector()
R.init_vector(m_delta,0)
R.init_vector(g,0)
m_prev = dl.Function(Vm)
print( "Nit CGit cost misfit reg sqrt(-G*D) ||grad|| alpha tolcg" )
while iter < maxiter and not converged:
# solve the adoint problem
adjoint_A, adjoint_RHS = dl.assemble_system(a_adj, L_adj, bc_adj)
dl.solve(adjoint_A, p.vector(), adjoint_RHS)
# evaluate the gradient
MG = dl.assemble(CTvarf + gradRvarf)
# calculate the L^2 norm of the gradient
dl.solve(M, g, MG)
grad2 = g.inner(MG)
gradnorm = np.sqrt(grad2)
# set the CG tolerance (use Eisenstat–Walker termination criterion)
if iter == 1:
gradnorm_ini = gradnorm
tolcg = min(0.5, np.sqrt(gradnorm/gradnorm_ini))
# assemble W_um and W_mm
C = dl.assemble(C_varf)
Wum = dl.assemble(Wum_varf)
Wmm = dl.assemble(Wmm_varf)
# define the Hessian apply operator (with preconditioner)
Hess_Apply = HessianOperator(R, Wmm, C, state_A, adjoint_A, W, Wum, bc_adj, use_gaussnewton=(iter<6) )
P = R + 0.1*gamma * M
Psolver = dl.PETScKrylovSolver("cg", amg_method())
Psolver.set_operator(P)
solver = CGSolverSteihaug()
solver.set_operator(Hess_Apply)
solver.set_preconditioner(Psolver)
solver.parameters["rel_tolerance"] = tolcg
solver.parameters["zero_initial_guess"] = True
solver.parameters["print_level"] = -1
# solve the Newton system H a_delta = - MG
solver.solve(m_delta, -MG)
total_cg_iter += Hess_Apply.cgiter
# linesearch
alpha = 1
descent = 0
no_backtrack = 0
m_prev.assign(m)
while descent == 0 and no_backtrack < 10:
m.vector().axpy(alpha, m_delta )
# solve the state/forward problem
state_A, state_b = dl.assemble_system(a_state, L_state, bc_state)
dl.solve(state_A, u.vector(), state_b)
# evaluate cost
[cost_new, misfit_new, reg_new] = cost(u, ud, m, gamma)
# check if Armijo conditions are satisfied
if cost_new < cost_old + alpha * c * MG.inner(m_delta):
cost_old = cost_new
descent = 1
else:
no_backtrack += 1
alpha *= 0.5
m.assign(m_prev) # reset a
# calculate sqrt(-G * D)
graddir = np.sqrt(- MG.inner(m_delta) )
sp = ""
print( "%2d %2s %2d %3s %8.5e %1s %8.5e %1s %8.5e %1s %8.5e %1s %8.5e %1s %5.2f %1s %5.3e" % \
(iter, sp, Hess_Apply.cgiter, sp, cost_new, sp, misfit_new, sp, reg_new, sp, \
graddir, sp, gradnorm, sp, alpha, sp, tolcg) )
# check for convergence
if gradnorm < tol and iter > 1:
converged = True
print( "Newton's method converged in ",iter," iterations" )
print( "Total number of CG iterations: ", total_cg_iter )
iter += 1
if not converged:
print( "Newton's method did not converge in ", maxiter, " iterations" )
nb.multi1_plot([mtrue, m], ["mtrue", "m"])
plt.show()
Hmisfit = HessianOperator(None, Wmm, C, state_A, adjoint_A, W, Wum, bc_adj, use_gaussnewton=False)
k = 50
p = 20
Omega = MultiVector(m.vector(), k+p)
parRandom.normal(1., Omega)
lmbda, evecs = doublePassG(Hmisfit, P, Psolver, Omega, k)
plt.plot(range(0,k), lmbda, 'b*', range(0,k+1), np.ones(k+1), '-r')
plt.yscale('log')
plt.xlabel('number')
plt.ylabel('eigenvalue')
plt.show()
nb.plot_eigenvectors(Vm, evecs, mytitle="Eigenvector", which=[0,1,2,5,10,15])
plt.show()
Mstate = dl.assemble(u_trial*u_test*dl.dx)
noise_norm2 = noise.inner(Mstate*noise)
return Vm.dim(), iter, total_cg_iter, noise_norm2, cost_new, misfit_new, reg_new
## Question 1 and 2
ns = [8,16,32, 64]
niters = []
ncgiters = []
ndofs = []
for n in ns:
ndof, niter, ncgiter, _,_,_,_ = AddDiffInverseProblem(nx=n, ny=n, v=dl.Constant((0., 0.)), gamma = 1e-9)
niters.append(niter)
ncgiters.append(ncgiter)
ndofs.append(ndof)
plt.figure(figsize=(15,5))
plt.subplot(121)
plt.semilogx(ndofs, niters)
plt.ylim([0, 12])
plt.xlabel("Parameter dimension")
plt.ylabel("Number of Newton iterations")
plt.subplot(122)
plt.semilogx(ndofs, ncgiters)
plt.ylim([0, 150])
plt.xlabel("Parameter dimension")
plt.ylabel("Number of CG iterations")
plt.show()
Nit CGit cost misfit reg sqrt(-G*D) ||grad|| alpha tolcg
1 1 6.52221e-07 6.52221e-07 4.96607e-15 5.00945e-03 6.06752e-05 1.00 5.000e-01
2 1 1.13293e-07 1.13293e-07 9.14913e-15 1.04135e-03 7.86055e-06 1.00 3.599e-01
3 1 1.10003e-07 1.10003e-07 1.00041e-14 8.11142e-05 7.42077e-07 1.00 1.106e-01
4 15 6.97229e-08 6.41187e-08 5.60424e-09 2.85281e-04 4.38316e-07 1.00 8.499e-02
5 2 6.88740e-08 6.32909e-08 5.58306e-09 4.11486e-05 1.86728e-07 1.00 5.548e-02
6 31 6.62655e-08 5.90831e-08 7.18245e-09 7.19944e-05 1.05202e-07 1.00 4.164e-02
7 4 6.62613e-08 5.90863e-08 7.17497e-09 2.91023e-06 1.48759e-08 1.00 1.566e-02
8 41 6.62537e-08 5.91034e-08 7.15030e-09 3.88444e-06 4.62641e-09 1.00 8.732e-03
Newton's method converged in 8 iterations
Total number of CG iterations: 96
Nit CGit cost misfit reg sqrt(-G*D) ||grad|| alpha tolcg
1 1 6.44949e-07 6.44949e-07 5.49106e-15 4.98284e-03 6.04706e-05 1.00 5.000e-01
2 1 1.16604e-07 1.16604e-07 1.01594e-14 1.03100e-03 7.86246e-06 1.00 3.606e-01
3 1 1.13463e-07 1.13463e-07 1.11886e-14 7.92665e-05 7.37309e-07 1.00 1.104e-01
4 14 8.04947e-08 7.68810e-08 3.61379e-09 2.64325e-04 3.80477e-07 1.00 7.932e-02
5 1 7.88897e-08 7.52759e-08 3.61378e-09 5.66582e-05 3.50859e-07 1.00 7.617e-02
6 18 7.54311e-08 7.08589e-08 4.57224e-09 8.23621e-05 1.55147e-07 1.00 5.065e-02
7 4 7.54042e-08 7.08549e-08 4.54939e-09 7.30930e-06 2.95683e-08 1.00 2.211e-02
8 39 7.53059e-08 7.04368e-08 4.86908e-09 1.40282e-05 2.02481e-08 1.00 1.830e-02
9 48 7.53058e-08 7.04413e-08 4.86453e-09 2.79629e-07 4.21737e-10 1.00 2.641e-03
Newton's method converged in 9 iterations
Total number of CG iterations: 127
Nit CGit cost misfit reg sqrt(-G*D) ||grad|| alpha tolcg
1 1 6.55848e-07 6.55848e-07 5.68862e-15 5.03043e-03 6.09740e-05 1.00 5.000e-01
2 1 1.08723e-07 1.08723e-07 1.04943e-14 1.04930e-03 7.91395e-06 1.00 3.603e-01
3 1 1.05332e-07 1.05332e-07 1.14304e-14 8.23607e-05 6.79620e-07 1.00 1.056e-01
4 16 8.45882e-08 8.16759e-08 2.91227e-09 2.05009e-04 2.89425e-07 1.00 6.890e-02
5 1 8.39902e-08 8.10779e-08 2.91226e-09 3.45821e-05 2.01908e-07 1.00 5.754e-02
6 18 8.28507e-08 8.00869e-08 2.76380e-09 4.69028e-05 9.23200e-08 1.00 3.891e-02
7 12 8.28296e-08 8.00394e-08 2.79017e-09 6.50020e-06 1.27988e-08 1.00 1.449e-02
8 42 8.28247e-08 7.99460e-08 2.87868e-09 3.11439e-06 5.77801e-09 1.00 9.735e-03
Newton's method converged in 8 iterations
Total number of CG iterations: 92
Nit CGit cost misfit reg sqrt(-G*D) ||grad|| alpha tolcg
1 1 6.58142e-07 6.58142e-07 5.72949e-15 5.03518e-03 6.10279e-05 1.00 5.000e-01
2 1 1.09119e-07 1.09119e-07 1.05678e-14 1.05113e-03 7.92104e-06 1.00 3.603e-01
3 1 1.05703e-07 1.05703e-07 1.14966e-14 8.26634e-05 6.71773e-07 1.00 1.049e-01
4 12 8.89432e-08 8.76464e-08 1.29679e-09 1.83051e-04 2.70869e-07 1.00 6.662e-02
5 1 8.85420e-08 8.72452e-08 1.29680e-09 2.83252e-05 1.74444e-07 1.00 5.346e-02
6 25 8.74799e-08 8.58267e-08 1.65324e-09 4.56526e-05 7.38359e-08 1.00 3.478e-02
7 1 8.74777e-08 8.58245e-08 1.65324e-09 2.10127e-06 1.32274e-08 1.00 1.472e-02
8 42 8.74720e-08 8.57698e-08 1.70212e-09 3.38632e-06 6.15204e-09 1.00 1.004e-02
Newton's method converged in 8 iterations
Total number of CG iterations: 84
## Question 2
n = 64
gammas = [1e-7, 1e-8, 1e-9, 1e-10]
misfits = []
for gamma in gammas:
ndof, niter, ncgiter, noise_norm2, cost,misfit,reg = AddDiffInverseProblem(nx=n, ny=n, v=dl.Constant((30., 0.)), gamma = gamma)
misfits.append(misfit)
plt.loglog(gammas, misfits, "-*b", label="Misfit")
plt.loglog([gammas[0],gammas[-1]], [.5*noise_norm2, .5*noise_norm2], "-r", label="Squared norm noise")
plt.title("Morozov discrepancy principle")
plt.xlabel("Regularization parameter")
plt.ylabel("Misfit cost")
plt.show()
print("Solve for gamma = ", 1e-9)
_ = AddDiffInverseProblem(nx=n, ny=n, v=dl.Constant((30., 0.)), gamma = 1e-9)
Nit CGit cost misfit reg sqrt(-G*D) ||grad|| alpha tolcg
1 1 1.44588e-07 1.44586e-07 2.00173e-12 3.37098e-03 2.50569e-05 1.00 5.000e-01
2 1 8.86418e-08 8.86394e-08 2.42031e-12 3.33919e-04 1.92835e-06 1.00 2.774e-01
3 4 8.34694e-08 8.12340e-08 2.23540e-09 1.01648e-04 3.25286e-07 1.00 1.139e-01
4 7 8.34411e-08 8.10895e-08 2.35165e-09 7.50678e-06 3.16071e-08 1.00 3.552e-02
5 9 8.34411e-08 8.10835e-08 2.35763e-09 1.70916e-07 6.93261e-10 1.00 5.260e-03
Newton's method converged in 5 iterations
Total number of CG iterations: 22
Nit CGit cost misfit reg sqrt(-G*D) ||grad|| alpha tolcg
1 1 1.44939e-07 1.44939e-07 2.00232e-13 3.37795e-03 2.50983e-05 1.00 5.000e-01
2 1 8.78893e-08 8.78890e-08 2.41984e-13 3.37130e-04 1.94176e-06 1.00 2.781e-01
3 4 7.79193e-08 7.66288e-08 1.29044e-09 1.40354e-04 3.32301e-07 1.00 1.151e-01
4 7 7.68263e-08 7.46023e-08 2.22399e-09 4.63259e-05 9.26959e-08 1.00 6.077e-02
5 14 7.67618e-08 7.43152e-08 2.44655e-09 1.13002e-05 2.45569e-08 1.00 3.128e-02
6 10 7.67617e-08 7.43074e-08 2.45429e-09 3.46780e-07 8.43866e-10 1.00 5.798e-03
Newton's method converged in 6 iterations
Total number of CG iterations: 37
Nit CGit cost misfit reg sqrt(-G*D) ||grad|| alpha tolcg
1 1 1.44981e-07 1.44981e-07 2.00324e-14 3.37487e-03 2.50691e-05 1.00 5.000e-01
2 1 8.87973e-08 8.87973e-08 2.42711e-14 3.34674e-04 1.92672e-06 1.00 2.772e-01
3 4 7.81429e-08 7.79532e-08 1.89704e-10 1.44841e-04 3.11119e-07 1.00 1.114e-01
4 10 7.33249e-08 7.22366e-08 1.08832e-09 9.68686e-05 1.28882e-07 1.00 7.170e-02
5 4 7.31164e-08 7.20600e-08 1.05634e-09 2.04324e-05 5.33343e-08 1.00 4.612e-02
6 31 7.25776e-08 7.08738e-08 1.70377e-09 3.30728e-05 4.13228e-08 1.00 4.060e-02
7 15 7.25756e-08 7.08991e-08 1.67650e-09 1.96776e-06 3.23088e-09 1.00 1.135e-02
Newton's method converged in 7 iterations
Total number of CG iterations: 66
Nit CGit cost misfit reg sqrt(-G*D) ||grad|| alpha tolcg
1 1 1.43579e-07 1.43579e-07 1.99758e-15 3.37306e-03 2.50540e-05 1.00 5.000e-01
2 1 8.70986e-08 8.70986e-08 2.41358e-15 3.35492e-04 1.93089e-06 1.00 2.776e-01
3 4 7.63948e-08 7.63771e-08 1.76503e-11 1.45565e-04 3.25078e-07 1.00 1.139e-01
4 10 7.18017e-08 7.16849e-08 1.16809e-10 9.49715e-05 1.17995e-07 1.00 6.863e-02
5 4 7.15428e-08 7.14293e-08 1.13449e-10 2.28159e-05 6.15462e-08 1.00 4.956e-02
6 79 6.97122e-08 6.87528e-08 9.59426e-10 6.26379e-05 5.10730e-08 1.00 4.515e-02
7 4 6.96823e-08 6.87259e-08 9.56407e-10 7.72313e-06 1.68136e-08 1.00 2.591e-02
8 88 6.96420e-08 6.87288e-08 9.13283e-10 8.89695e-06 7.25118e-09 1.00 1.701e-02
Newton's method converged in 8 iterations
Total number of CG iterations: 191
Solve for gamma = 1e-09
Nit CGit cost misfit reg sqrt(-G*D) ||grad|| alpha tolcg
1 1 1.43675e-07 1.43675e-07 2.00379e-14 3.37223e-03 2.50586e-05 1.00 5.000e-01
2 1 8.80064e-08 8.80064e-08 2.42768e-14 3.33150e-04 1.92489e-06 1.00 2.772e-01
3 4 7.63877e-08 7.61804e-08 2.07306e-10 1.51268e-04 3.19899e-07 1.00 1.130e-01
4 8 7.22529e-08 7.13474e-08 9.05514e-10 9.00258e-05 1.24214e-07 1.00 7.041e-02
5 10 7.14981e-08 7.03149e-08 1.18324e-09 3.88606e-05 6.64498e-08 1.00 5.150e-02
6 35 7.12458e-08 6.96656e-08 1.58016e-09 2.24734e-05 3.18522e-08 1.00 3.565e-02
7 18 7.12455e-08 6.96649e-08 1.58064e-09 7.64028e-07 1.47711e-09 1.00 7.678e-03
Newton's method converged in 7 iterations
Total number of CG iterations: 77
Copyright © 2016-2018, The University of Texas at Austin & University of California, Merced. All Rights reserved. See file COPYRIGHT for details.
This file is part of the hIPPYlib library. For more information and source code availability see https://hippylib.github.io.
hIPPYlib is free software; you can redistribute it and/or modify it under the terms of the GNU General Public License (as published by the Free Software Foundation) version 2.0 dated June 1991.