Image Denoising: Tikhonov and Total Variation Regularization
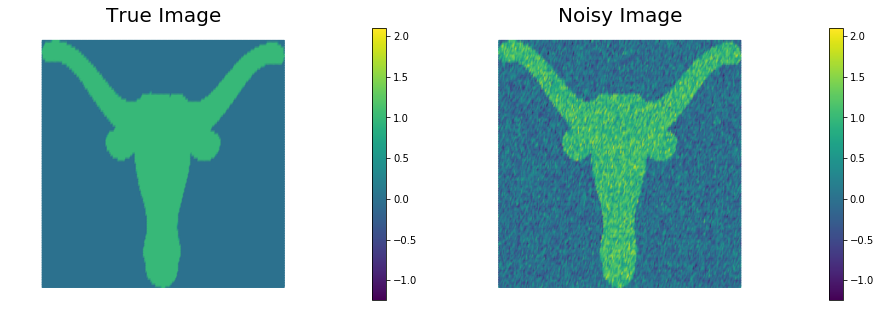
The problem of removing noise from an image without blurring sharp edges can be formulated as an infinite-dimensional minimization problem. Given a possibly noisy image defined within a rectangular domain , we would like to find the image that is closest in the sense, i.e. we want to minimize
while also removing noise, which is assumed to comprise very rough components of the image. This latter goal can be incorporated as an additional term in the objective, in the form of a penalty, i.e.,
where acts as a diffusion coefficient that controls how strongly we impose the penalty, i.e. how much smoothing occurs. Unfortunately, if there are sharp edges in the image, this so-called Tikhonov (TN) regularization will blur them. Instead, in these cases we prefer the so-called total variation (TV) regularization,
where (we will see that) taking the square root is the key to preserving edges. Since is not differentiable when , it is usually modified to include a positive parameter as follows:
We wish to study the performance of the two denoising functionals and , where
and
We prescribe the homogeneous Neumann condition on the four sides of the square, which amounts to assuming that the image intensity does not change normal to the boundary of the image.
1. Setup
-
We generate a rectangular mesh of size
LxbyLy. -
We define a linear finite element space.
-
We generate two finite element functions
u_trueandu_0that represent the true image and the noisy image respectively.
from __future__ import print_function, division, absolute_import
import matplotlib.pyplot as plt
%matplotlib inline
import dolfin as dl
from hippylib import nb
import math
import numpy as np
import logging
from unconstrainedMinimization import InexactNewtonCG
logging.getLogger('FFC').setLevel(logging.WARNING)
logging.getLogger('UFL').setLevel(logging.WARNING)
dl.set_log_active(False)
data = np.loadtxt('image.dat', delimiter=',')
np.random.seed(seed=1)
noise_std_dev = .3
noise = noise_std_dev*np.random.randn(data.shape[0], data.shape[1])
Lx = float(data.shape[1])/float(data.shape[0])
Ly = 1.
class Image(dl.Expression):
def __init__(self, Lx, Ly, data, **kwargs):
self.data = data
self.hx = Lx/float(data.shape[1]-1)
self.hy = Ly/float(data.shape[0]-1)
def eval(self, values, x):
j = int(math.floor(x[0]/self.hx))
i = int(math.floor(x[1]/self.hy))
values[0] = self.data[i,j]
mesh = dl.RectangleMesh(dl.Point(0,0),dl.Point(Lx,Ly),200, 100)
V = dl.FunctionSpace(mesh, "Lagrange",1)
trueImage = Image(Lx,Ly,data,degree = 1)
noisyImage = Image(Lx,Ly,data+noise, degree = 1)
u_true = dl.interpolate(trueImage, V)
u_0 = dl.interpolate(noisyImage, V)
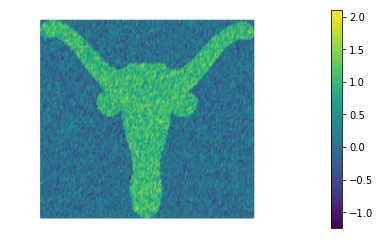
# Get min/max of noisy image, so that we can show all plots in the same scale
vmin = np.min(u_0.vector().get_local())
vmax = np.max(u_0.vector().get_local())
plt.figure(figsize=(15,5))
nb.plot(u_true, subplot_loc=121, mytitle="True Image", vmin=vmin, vmax = vmax)
nb.plot(u_0, subplot_loc=122, mytitle="Noisy Image", vmin=vmin, vmax = vmax)
plt.show()
2. The misfit functional and the true error functional
Here we describe the variational forms for the misfit functional and its first and second variations.
Since we also know the true image u_true (this will not be the case for real applications)
we can also write the true error functional
Finally, we define some values of () for the choice of the regularization paramenter.
u = dl.Function(V)
u_hat = dl.TestFunction(V)
u_tilde = dl.TrialFunction(V)
F_ls = dl.Constant(.5)*dl.inner(u - u_0, u - u_0)*dl.dx
grad_ls = dl.inner(u - u_0, u_hat)*dl.dx
H_ls = dl.inner(u_tilde, u_hat)*dl.dx
trueError = dl.inner(u - u_true, u - u_true)*dl.dx
n_alphas = 4
alphas = np.power(10., -np.arange(1, n_alphas+1))
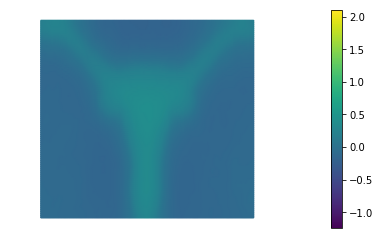
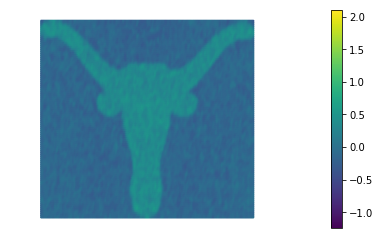
3. Tikhonov regularization
The function TNsolution computes the solution of the denoising inverse problem using Tikhonov regularization for a given amount a regularization .
More specifically it minimizes the functional
The first variation of reads
and the second variation is
The best reconstruction of the original image is obtained for , however we notice that the sharp edges of the image are lost in the reconstruction.
def TNsolution(alpha):
R_tn = dl.Constant(.5)*dl.inner(dl.grad(u), dl.grad(u))*dl.dx
grad_tn = dl.inner(dl.grad(u), dl.grad(u_hat))*dl.dx
H_tn = dl.inner(dl.grad(u_tilde), dl.grad(u_hat))*dl.dx
F = F_ls + alpha*R_tn
grad = grad_ls + alpha*grad_tn
H = H_ls + alpha*H_tn
dl.solve(H==-grad, u)
print( "{0:15e} {1:15e} {2:15e} {3:15e} {4:15e}".format(
alpha.values()[0], dl.assemble(F), dl.assemble(F_ls), dl.assemble(alpha*R_tn), dl.assemble(trueError)) )
plt.figure()
nb.plot(u, vmin=vmin, vmax = vmax)
plt.show()
print( "{0:15} {1:15} {2:15} {3:15} {4:15}".format("alpha", "F", "F_ls", "alpha*R_tn", "True Error") )
for alpha in alphas:
TNsolution(dl.Constant(alpha))
alpha F F_ls alpha*R_tn True Error
1.000000e-01 1.888317e-01 1.687812e-01 2.005046e-02 2.520662e-01

1.000000e-02 2.034907e-01 1.864572e-01 1.703349e-02 2.893618e-01
1.000000e-03 1.012200e-01 9.155309e-02 9.666912e-03 1.052391e-01

1.000000e-04 1.479768e-01 1.412953e-01 6.681556e-03 2.304038e-01
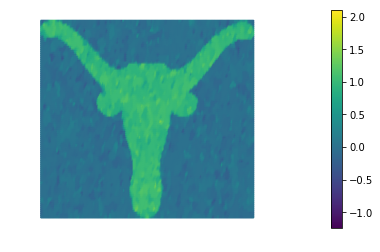
4. Total Variation regularization
The function TVsolution computes the solution of the denoising inverse problem using Total Variation regularization for a given amount a regularization and perturbation .
More specifically it minimizes the functional
The first variation of reads and the second variation is
The highly nonlinear term in the second variation poses a substantial challange for the convergence of the Newton’s method. In fact, the converge radius of the Newtos’s method is extremely small. For this reason in the following we will replace the second variation with the variational form
For small values of , there are more efficient methods for solving TV-regularized inverse problems than the basic Newton method we use here; in particular, so-called primal-dual Newton methods are preferred (see T.F. Chan, G.H. Golub, and P. Mulet, A nonlinear primal-dual method for total variation-based image restoration, SIAM Journal on Scientific Computing, 20(6):1964–1977, 1999). The efficient solution of TV-regularized inverse problems is still an active field of research.
The resulting method will exhibit only a first order convergence rate but it will be more robust for small values of .
The best reconstruction of the original image is obtained for . We also notice that Total Variation does a much better job that Tikhonov regularization in preserving the sharp edges of the original image.
def TVsolution(eps, alpha):
def TV(u, eps):
return dl.sqrt( dl.inner(dl.grad(u), dl.grad(u)) + eps)
def scaled_grad(u, eps):
return dl.grad(u)/TV(u,eps)
R_tv = TV(u, eps)*dl.dx
F = F_ls + alpha*R_tv
grad_tv = dl.Constant(1.)/TV(u, eps)*dl.inner(dl.grad(u), dl.grad(u_hat))*dl.dx
grad = grad_ls + alpha*grad_tv
H_tv = dl.Constant(1.)/TV(u, eps)*dl.inner(dl.grad(u_tilde), dl.grad(u_hat))*dl.dx #+ \
# dl.Constant(1.)/TV(u, eps)*dl.inner(dl.outer(scaled_grad(u,eps), scaled_grad(u,eps) )*dl.grad(u_tilde), dl.grad(u_hat))*dl.dx
H = H_ls + alpha*H_tv
solver = InexactNewtonCG()
solver.parameters["rel_tolerance"] = 1e-5
solver.parameters["abs_tolerance"] = 1e-6
solver.parameters["gdu_tolerance"] = 1e-18
solver.parameters["max_iter"] = 1000
solver.parameters["c_armijo"] = 1e-5
solver.parameters["print_level"] = -1
solver.parameters["max_backtracking_iter"] = 10
solver.solve(F, u, grad, H)
print( "{0:15e} {1:15e} {2:5} {3:4d} {4:15e} {5:15e} {6:15e} {7:15e}".format(
alpha.values()[0], eps.values()[0], solver.converged, solver.it, dl.assemble(F), dl.assemble(F_ls), dl.assemble(alpha*R_tv), dl.assemble(trueError))
)
plt.figure()
nb.plot(u, vmin=vmin, vmax = vmax)
plt.show()
print ("{0:15} {1:15} {2:5} {3:4} {4:15} {5:15} {6:15} {7:15}".format("alpha", "eps", "converged", "nit", "F", "F_ls", "alpha*R_tn", "True Error") )
eps = dl.Constant(1e-4)
for alpha in alphas:
TVsolution(eps, dl.Constant(alpha))
alpha eps converged nit F F_ls alpha*R_tn True Error
1.000000e-01 1.000000e-04 1 688 2.208528e-01 2.134489e-01 7.403896e-03 3.419669e-01

1.000000e-02 1.000000e-04 1 332 9.018107e-02 5.045327e-02 3.972780e-02 1.619008e-02

1.000000e-03 1.000000e-04 1 100 4.384282e-02 2.895010e-02 1.489273e-02 1.173449e-02
1.000000e-04 1.000000e-04 1 13 9.558218e-03 1.026104e-03 8.532114e-03 6.968568e-02
Hands on
Question 1
For both and , derive gradients and Hessians using calculus of variations, in both weak form and strong form.
Hint: To derive the Hessian of , recall the identity , where , and is the inner product and is a matrix of rank one.
Question 2
Show that when is zero, is not differentiable, but is.
Question 3
Derive expressions for the two eigenvalues and corresponding eigenvectors of the tensor diffusion coefficient that appears in the Hessian of the functional. Based on these expressions, give an explanation of why is effective at preserving sharp TV edges in the image, while is not. Consider a single Newton step for this argument.
Question 4
Show that for large enough , behaves like , and for , the Hessian of is singular. This suggests that should be chosen small enough that edge preservation is not lost, but not too small that ill-conditioning occurs.
Question 5
Solve the denoising inverse problem defined above using TV regularization for and different values of (e.g., from to ). How does the number of nonlinear iterations behave for decreasing ? Try to explain this behavior based on your answer to Question 4.
The number of nonlinear interations increases as we decrease . In fact, as we decrease the the becomes more nonlinear and its Hessian becomes more and more ill-conditioned.
alpha = dl.Constant(1e-2)
eps_s = [10., 1., 0.1, 1e-2, 1e-3, 1e-4]
for eps in eps_s:
u.assign(dl.interpolate(dl.Constant(0.), V)) #Always start with the same initial guess
TVsolution(dl.Constant(eps), alpha)
1.000000e-02 1.000000e+01 1 45 1.411075e-01 5.090067e-02 9.020687e-02 2.041545e-02

1.000000e-02 1.000000e+00 1 75 1.050705e-01 5.082861e-02 5.424194e-02 1.800654e-02

1.000000e-02 1.000000e-01 1 116 9.442521e-02 5.066080e-02 4.376441e-02 1.682353e-02

1.000000e-02 1.000000e-02 1 169 9.133863e-02 5.052624e-02 4.081239e-02 1.635375e-02

1.000000e-02 1.000000e-03 1 247 9.044518e-02 5.046918e-02 3.997599e-02 1.622075e-02

1.000000e-02 1.000000e-04 1 337 9.018107e-02 5.045326e-02 3.972781e-02 1.619008e-02

Copyright © 2016-2018, The University of Texas at Austin & University of California, Merced. All Rights reserved. See file COPYRIGHT for details.
This file is part of the hIPPYlib library. For more information and source code availability see https://hippylib.github.io.
hIPPYlib is free software; you can redistribute it and/or modify it under the terms of the GNU General Public License (as published by the Free Software Foundation) version 2.0 dated June 1991.