Inferring loads on an Euler Bernoulli beam
Here we look at another linear Gaussian inverse problem, but one with a distributed parameter field and PDE forward model. More specifically, the inverse problem is to infer the forces acting along a cantilevered beam.
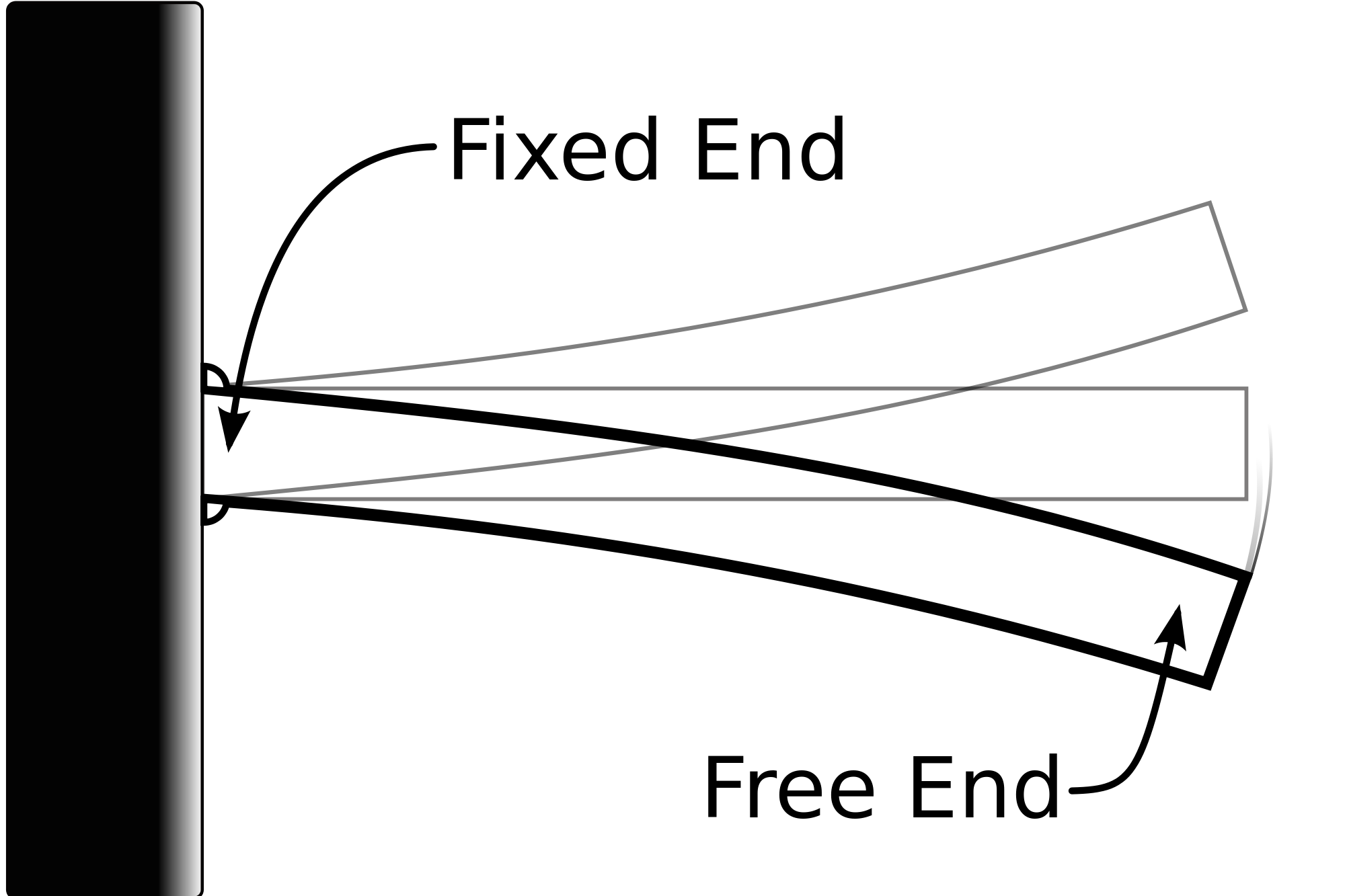
Image courtesy of wikimedia.org
Formulation:
Let $u(x)$ denote the vertical deflection of the beam and let $m(x)$ denote the vertial force acting on the beam at point $x$ (positive for upwards, negative for downwards). We assume that the displacement can be well approximated using Euler-Bernoulli beam theory and thus satisfies the PDE where $E(x)$ is an effective stiffness that depends both on the beam geometry and material properties. In this lab, we assume $E(x)$ is constant and $E(x)=10^5$. However, in future labs, $E(x)$ will also be an inference target.
For a beam of length $L$, the cantilever boundary conditions take the form and
Discretizing this PDE with finite differences (or finite elements, etc…), we obtain a linear system of the form where $u\in\mathbb{R}^N$ and $m\in\mathbb{R}^N$ are vectors containing approximations of $u(x)$ and $m(x)$ at the finite difference nodes.
Only $M$ components of the $N$ dimensional vector $u$ are observed. To account for this, we introduce a sparse matrix $B$ that extracts $M$ unique components of $u$. Combining this with an additive Gaussian noise model, we obtain
where $\epsilon \sim N(0,\Sigma_y)$.
Notes:
- With the Gaussian process tools in MUQ, spatial locations are treated as columns of a matrix. In 1D, this means that that the list of finite difference nodes will be a row vector. This means that
x.shapeshould return $(1,N)$, where $N$ is the number of points in the finite difference discretization. - Reference the Gaussian process and linear regression notebooks for help on MUQ syntax.
Imports
import sys
sys.path.insert(0,'/home/fenics/Installations/MUQ_INSTALL/lib')
from IPython.display import Image
import numpy as np
import matplotlib.pyplot as plt
import h5py
# MUQ Includes
import pymuqModeling as mm # Needed for Gaussian distribution
import pymuqApproximation as ma # Needed for Gaussian processes
Read discretization and observations
f = h5py.File('FullProblemDefinition.h5','r')
x = np.array( f['/ForwardModel/NodeLocations'] )
K = np.array( f['/ForwardModel/SystemMatrix'] )
B = np.array( f['/Observations/ObservationMatrix'] )
obsData = np.array( f['/Observations/ObservationData'] )
trueLoad = np.array( f['/ForwardModel/Loads'])
numObs = obsData.shape[0]
numPts = x.shape[1]
dim = 1
Construct components of the likelihood
obsMat = np.linalg.solve(K,B.T).T
noiseCov = 1e-12 * np.eye(numObs)
Define a Gaussian Process prior
priorVar = 10*10
priorLength = 0.5
priorNu = 3.0/2.0 # must take the form N+1/2 for zero or odd N (i.e., {0,1,3,5,...})
kern1 = ma.MaternKernel(1, 1.0, priorLength, priorNu)
kern2 = ma.ConstantKernel(1, priorVar)
kern = kern1 + kern2
dim =1
coDim = 1 # The dimension of the load field at a single point
mu = ma.ZeroMean(dim,coDim)
priorGP = ma.GaussianProcess(mu,kern)
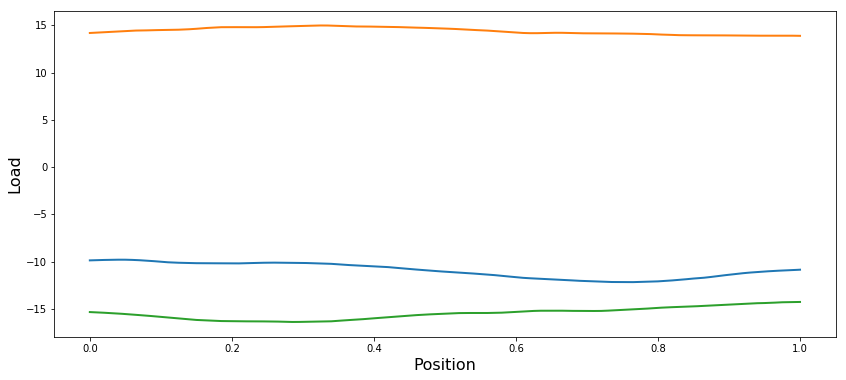
Plot prior samples
plt.figure(figsize=(14,6))
numSamps = 3
for i in range(numSamps):
samp = priorGP.Sample(x)
plt.plot(x[0,:], samp[0,:], linewidth=2)
plt.xlabel('Position',fontsize=16)
plt.ylabel('Load',fontsize=16)
plt.show()
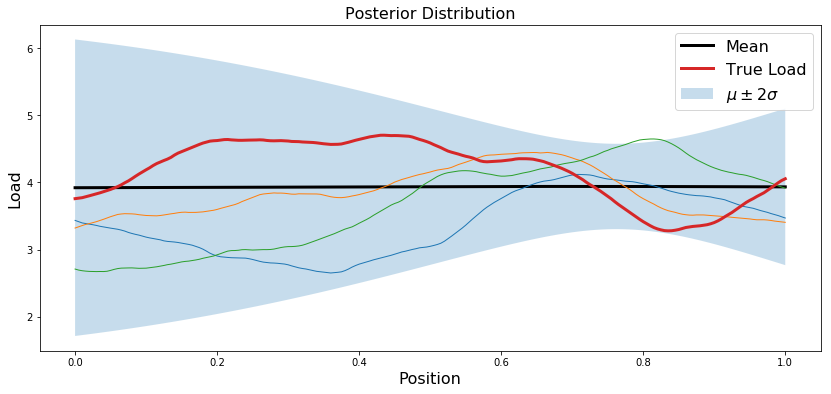
Compute posterior
prior = priorGP.Discretize(x)
post = prior.Condition(obsMat, obsData, noiseCov)
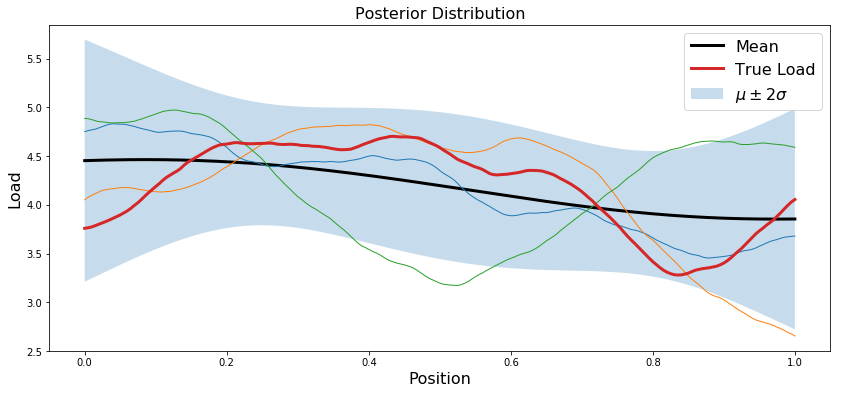
Plot posterior
postMean = post.GetMean()
postCov = post.GetCovariance()
postStd = np.sqrt(np.diag(postCov))
plt.figure(figsize=(14,6))
plt.plot(x.T, postMean, 'k', linewidth=3, label='Mean')
plt.fill_between(x[0,:], postMean+2.0*postStd, postMean-2.0*postStd, alpha=0.25, edgecolor='None', label='$\mu \pm 2\sigma$')
for i in range(numSamps):
samp = post.Sample()
plt.plot(x.T, samp.T, linewidth=1)
plt.plot(x.T, trueLoad, linewidth=3, label='True Load')
plt.legend(fontsize=16)
plt.title('Posterior Distribution',fontsize=16)
plt.xlabel('Position',fontsize=16)
plt.ylabel('Load',fontsize=16)
plt.show()
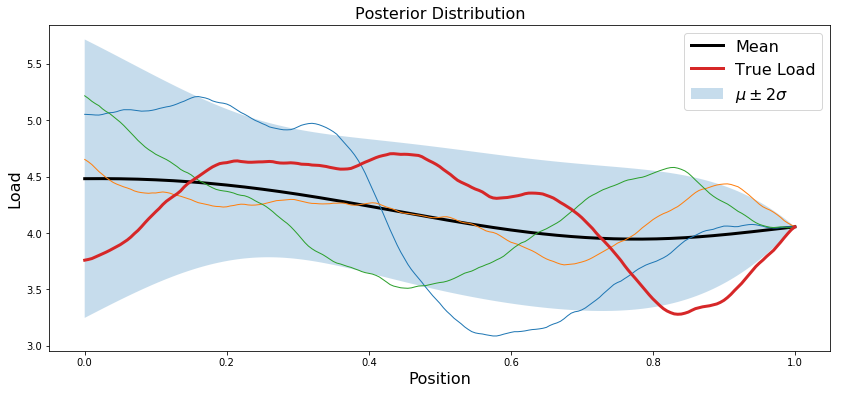
Incorporate observation of the load sum
Assume you are now given an additional observation: the sum of the load vector $m$.
sumObs = np.array( f['/Observations/LoadSum'] )
sumNoiseVar = 1e-7 * np.ones(1)
obsMatSum = np.ones((1,numPts))
sumPost = post.Condition(obsMatSum, sumObs, sumNoiseVar)
postMean = sumPost.GetMean()
postCov = sumPost.GetCovariance()
postStd = np.sqrt(np.diag(postCov))
plt.figure(figsize=(14,6))
plt.plot(x.T, postMean, 'k', linewidth=3, label='Mean')
plt.fill_between(x[0,:], postMean+2.0*postStd, postMean-2.0*postStd, alpha=0.25, edgecolor='None', label='$\mu \pm 2\sigma$')
for i in range(numSamps):
samp = sumPost.Sample()
plt.plot(x.T, samp.T, linewidth=1)
plt.plot(x.T, trueLoad, linewidth=3, label='True Load')
plt.legend(fontsize=16)
plt.title('Posterior Distribution',fontsize=16)
plt.xlabel('Position',fontsize=16)
plt.ylabel('Load',fontsize=16)
plt.show()
Incorporate a point observation of the load itself
ptObs = np.array( f['/Observations/LoadPoint'] )
obsMatPt = np.zeros((1,numPts))
obsMatPt[0,-1] = 1
pointNoiseVar = 1e-4 * np.ones(1)
ptPost = sumPost.Condition(obsMatPt, ptObs, sumNoiseVar)
postMean = ptPost.GetMean()
postCov = ptPost.GetCovariance()
postStd = np.sqrt(np.diag(postCov))
plt.figure(figsize=(14,6))
plt.plot(x.T, postMean, 'k', linewidth=3, label='Mean')
plt.fill_between(x[0,:], postMean+2.0*postStd, postMean-2.0*postStd, alpha=0.25, edgecolor='None', label='$\mu \pm 2\sigma$')
for i in range(numSamps):
samp = ptPost.Sample()
plt.plot(x.T, samp.T, linewidth=1)
plt.plot(x.T, trueLoad, linewidth=3, label='True Load')
plt.legend(fontsize=16)
plt.title('Posterior Distribution',fontsize=16)
plt.xlabel('Position',fontsize=16)
plt.ylabel('Load',fontsize=16)
plt.show()
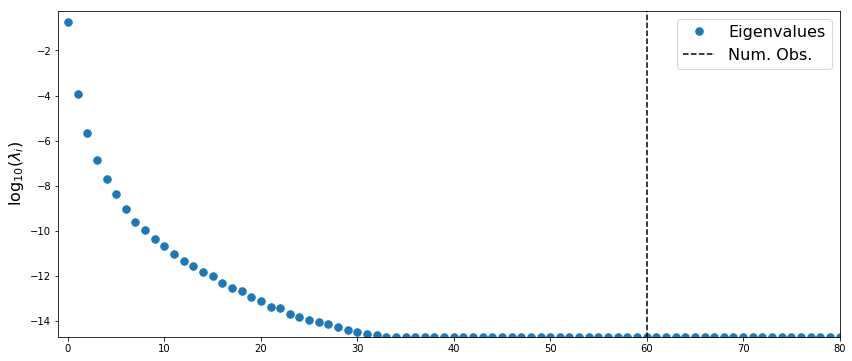
Analyze low-rank structure
The posterior precision is given by $\Gamma_{pos}^{-1} = H + \Gamma_{pr}^{-1}$, where $H$ is the Hessian of the log-likelihood function. In this example, $H = A^T\Gamma_{obs}A$
import scipy.linalg as la
Rank of likelihood Hessian
likelyHess = np.dot( obsMat.T, la.solve(noiseCov, obsMat))
hessVals, _ = la.eigh(likelyHess)
hessVals[hessVals<1e-15] = 1e-15
logHessVals = np.log10(hessVals+1e-15)
plt.figure(figsize=(14,6))
plt.plot(logHessVals[::-1], '.',markersize=15, label='Eigenvalues')
plt.plot([numObs,numObs],[-100,100],'--k',label='Num. Obs.')
plt.ylabel('$\log_{10}(\lambda_i)$',fontsize=16)
plt.ylim((np.min(logHessVals),0.5+np.max(logHessVals)))
plt.legend(fontsize=16)
plt.xlim((-1,80))
plt.show()
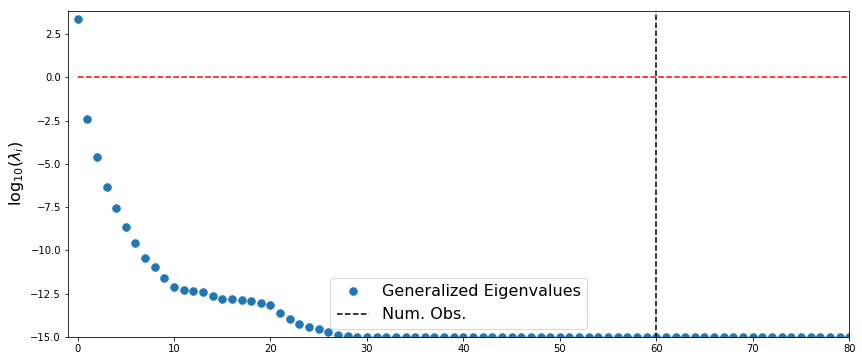
Likelihood-Informed Subspace
likelyHess = np.dot( obsMat.T, la.solve(noiseCov, obsMat))
priorPrec = prior.GetPrecision()
postPrec = priorPrec + likelyHess
priorVals, _ = la.eigh(priorPrec)
priorVals[priorVals<1e-15] = 1e-15
postVals, _ = la.eigh(postPrec)
postVals[postVals<1e-15] = 1e-15
lisVals, _ = la.eigh(likelyHess, priorPrec)
lisVals[lisVals<1e-15] = 1e-15
plt.figure(figsize=(14,6))
logLisVals = np.log10(lisVals)
plt.plot(logLisVals[::-1], '.',markersize=15, label='Generalized Eigenvalues', linewidth=3)
plt.plot([numObs,numObs],[-100,100],'--k',label='Num. Obs.')
plt.plot([0,numPts],[0,0],'--r')
plt.ylabel('$\log_{10}(\lambda_i)$',fontsize=16)
plt.ylim((np.min(logLisVals),0.5+np.max(logLisVals)))
plt.xlim((-1,80))
plt.legend(fontsize=16)
plt.show()